8 - 7
MELSEC-A
8 ZERO POINT RETURN CONTROL
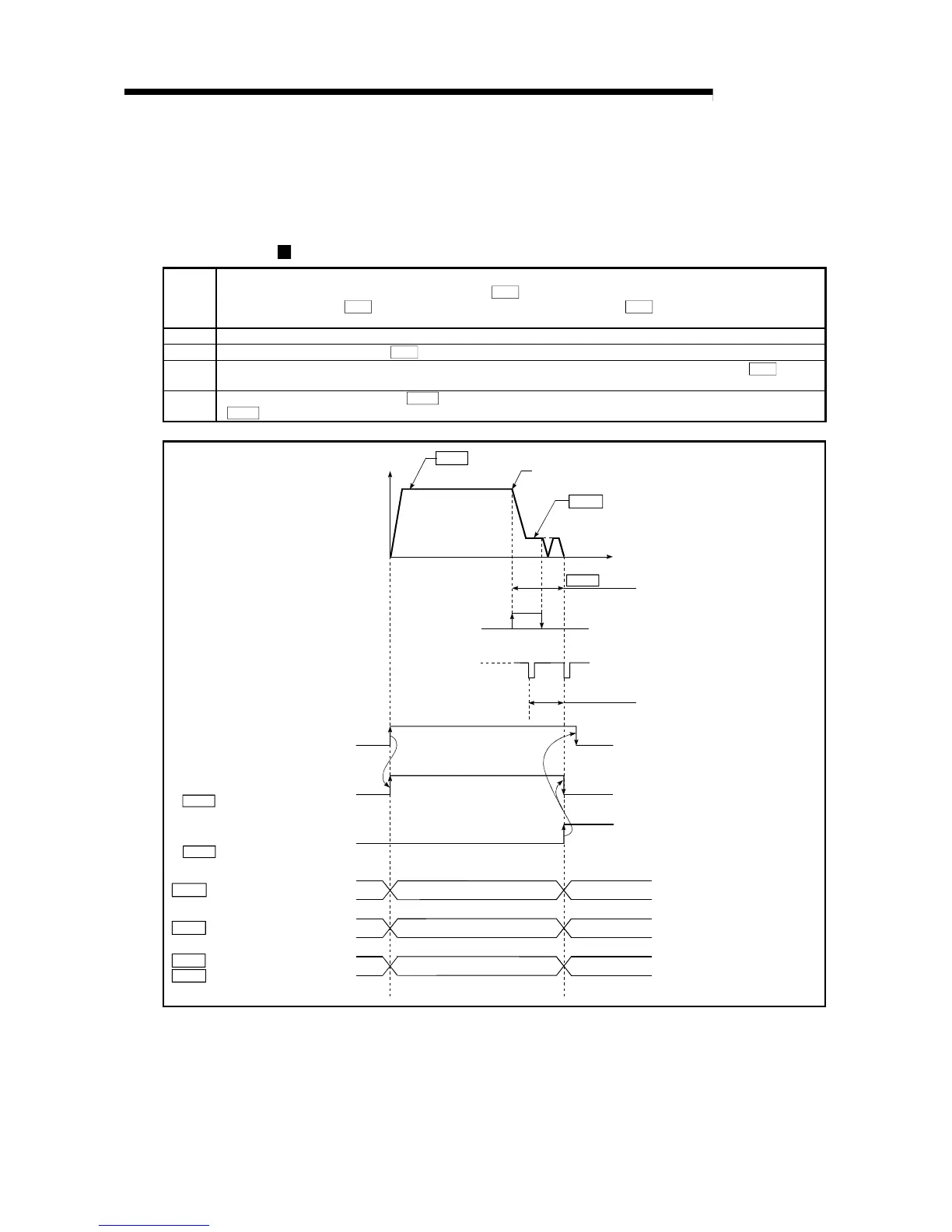
8.2.3 Zero point return method (1): Near-point dog method
The following shows an operation outline of the "near-point dog method" zero point
return method.
Operation chart
1)
The machine zero point return is started.
(The machine begins the acceleration designated in "
Pr.53
Zero point return acceleration time selection", in the
direction designated in "
Pr.46
Zero point return direction". It then moves at the "
Pr.48
Zero point return speed" when
the acceleration is completed.)
2) The machine begins decelerating when the near-point dog ON is detected.
3)
The machine decelerates to the "
Pr.49
Creep speed", and subsequently moves at that speed.
4)
At detection of the near-point dog OFF, the machine decelerates to a stop. The machine accelerates to "
Pr.49
Creep
speed" again and stops at the first zero point.
5)
The zero point return complete flag (
Md.40
Status: b4) turns from OFF to ON, and the zero point return request flag
(
Md.40
Status: b3) turns from ON to OFF.
4) 5)
Md.29 Current feed value
Md.35 Axis operation status
Zero point
Zero point address
Machine zero point return start
(Positioning start signal)
Near-point dog
Md.44 Movement amount after near-point dog ON
Deceleration at the near-point dog ON
One servomotor rotation
t
ON
ON
OFF
OFF
ON
0
V
ON
Zero point return complete flag
[ Md.40 Status : b4]
Standing by
In zero point return
Value of *1.
Md.30 Machine feed value
1) 2) 3)
Standing by
Pr. 49 Creep speed
Pr. 48 Zero point return speed
Md.44 Movement amount
after near-point dog ON
OFF
Zero point return request flag
[ Md.40 Status : b3]
Inconsistent
Inconsistent
*
1
OFF
Value the machine moved is stored
Fig. 8.2 Near-point dog method machine zero point return

 Loading...
Loading...







