8 - 12
MELSEC-A
8 ZERO POINT RETURN CONTROL
Precautions during operation
(1) If "
Pr.52
Setting for the movement amount after near-point dog ON" is less
than the distance of deceleration from "
Pr.48
Zero point return speed" to
"
Pr.49
Creep speed", an error "count method movement amount fault" (error
code: 206) occurs, disabling a start.
The machine decelerates to a stop if an error occurs due to a speed change
made midway during operation.
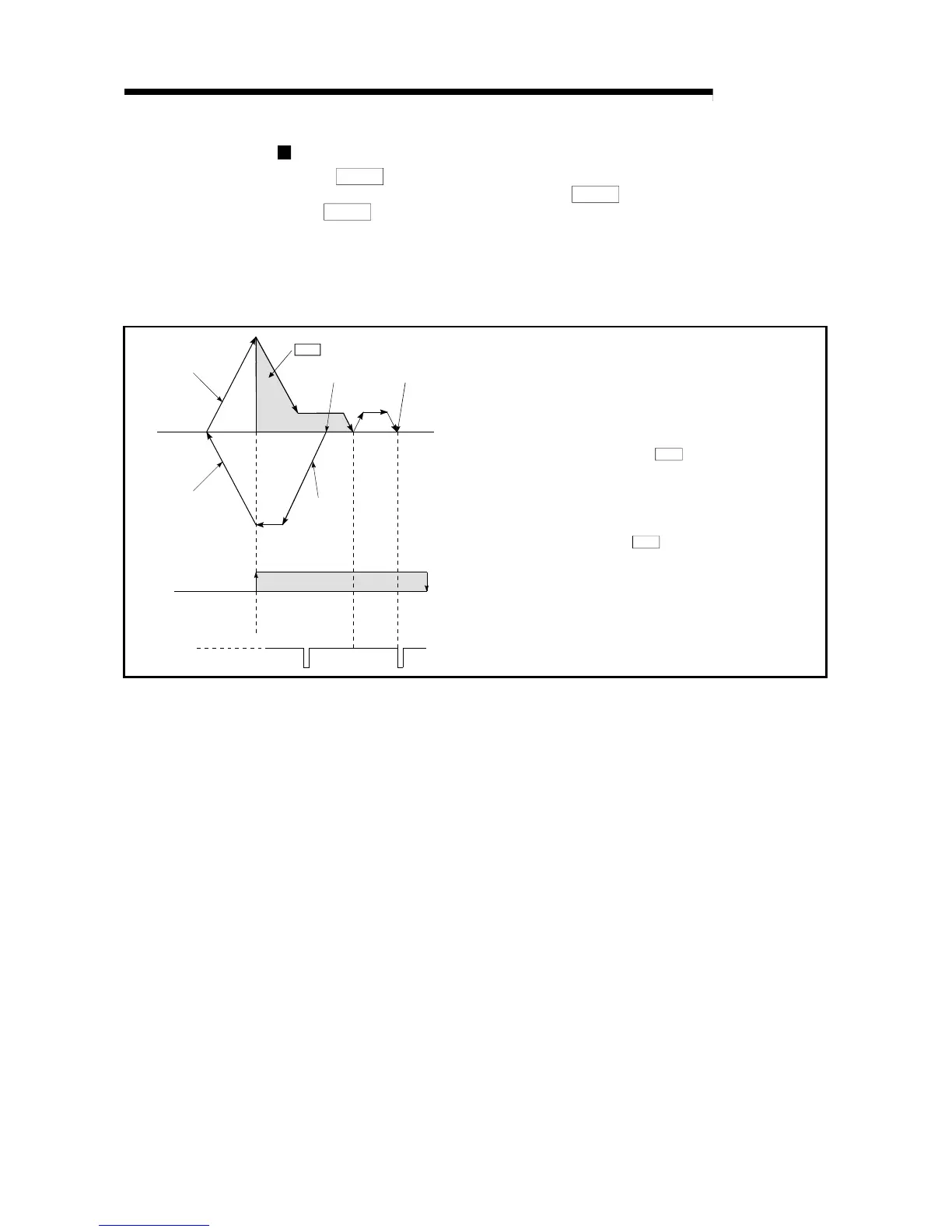
(2) The operation performed when a machine zero point return is stared while the
near-point dog is ON is shown below.
Near-point dog
Zero point
OFF
ON
1)
4)
3)
2)
Setting for the movement amount
after near-point dog ON
Pr.52
5)
[Operation performed when machine zero point return is stared
while the near-point dog is ON]
1) The machine zero point return is started.
2) The machine moves at the zero point return speed in the
direction opposite to the designated zero point return direction.
3) At detection of the near-point dog OFF, deceleration processing
is carried out according to the "
Pr.40
Stop group 3 sudden stop
selection" setting.
4) After a stop, the machine makes a machine zero point return in
the designated zero point return direction.
5) At detection of the near-point dog ON, the machine moves the
movement amount set to "
Pr.52
Setting for the movement
amount after near-point dog ON", and completes the machine
zero point return at detection of the first zero point.
Fig. 8.6 Count method 1) machine zero point return with near-point dog ON
(3) Turn OFF the near-point dog sufficiently away from the zero point position.
If the near-point dog is turned OFF during a machine zero point return, there is
no harm in operation. For the following reason, however, it is recommended to
turn OFF the near-point dog sufficiently away from the zero point position.
Reason: If a machine zero point return is made continuously after the near-
point dog is turned OFF at completion of a machine zero point return,
the machine operates at the zero point return speed until it reaches
the hardware stroke limit (upper/lower limit).

 Loading...
Loading...







