8 - 14
MELSEC-A
8 ZERO POINT RETURN CONTROL
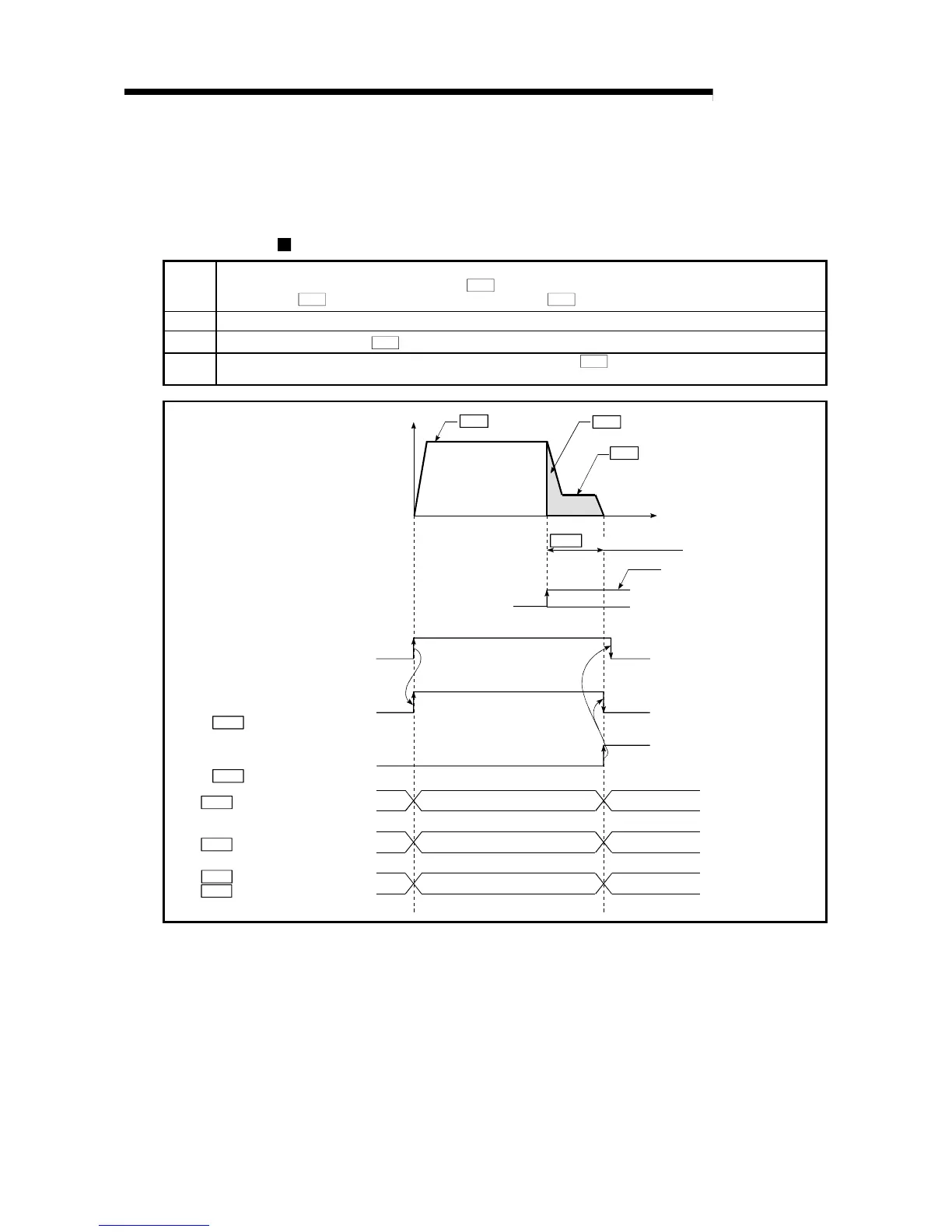
8.2.6 Zero point return method (4): Count method 2)
The following shows the operation outline of the zero point return method "count
method 2)".
Operation chart
1)
The machine zero point return is started.
(The machine starts acceleration designated in "
Pr.53
Zero point return acceleration time selection" in the direction
designated in "
Pr.46
Zero point return direction", and moves at "
Pr.48
Zero point return speed".)
2)
At detection of the near-point dog ON, the machine starts deceleration.
3) The machine decelerates to "
Pr.49
Creep speed", and then moves at the creep speed.
4)
The machine stops as soon as it moves the movement amount set to "
Pr.52
Setting for the movement amount after
near-point dog ON" after the near-point dog has turned ON, completing the machine zero point return.
t
Zero point
return speed
V
*1
Setting for the movement amount
after near-point dog ON
Creep speed
ON
OFF
ON
OFF
ON
Near-point dog
ON
OFF
Turn OFF the near-point
dog sufficiently away from
the zero point position.
Standing by In zero point return
Standing by
Inconsistent
0
Inconsistent
Value the machine moved is stored Zero point address
Value of *1
OFF
Pr.48
Pr.49
Pr.52
Md.44
1) 2) 3) 4)
Machine zero point return start
(Positioning start signal)
Movement amount after
near-point dog ON
Md.44
Current feed value
Machine feed value
Md.29
Md.30
Axis operation status
Md.35
Zero point return request flag
[ Status: b3]
Md.40
Zero point return complete flag
[ Status: b4]
Md.40
Movement amount after near-point dog ON
Fig. 8.8 Count method 2) machine zero point return

 Loading...
Loading...







