14 - 69
MELSEC-A
14 TROUBLESHOOTING
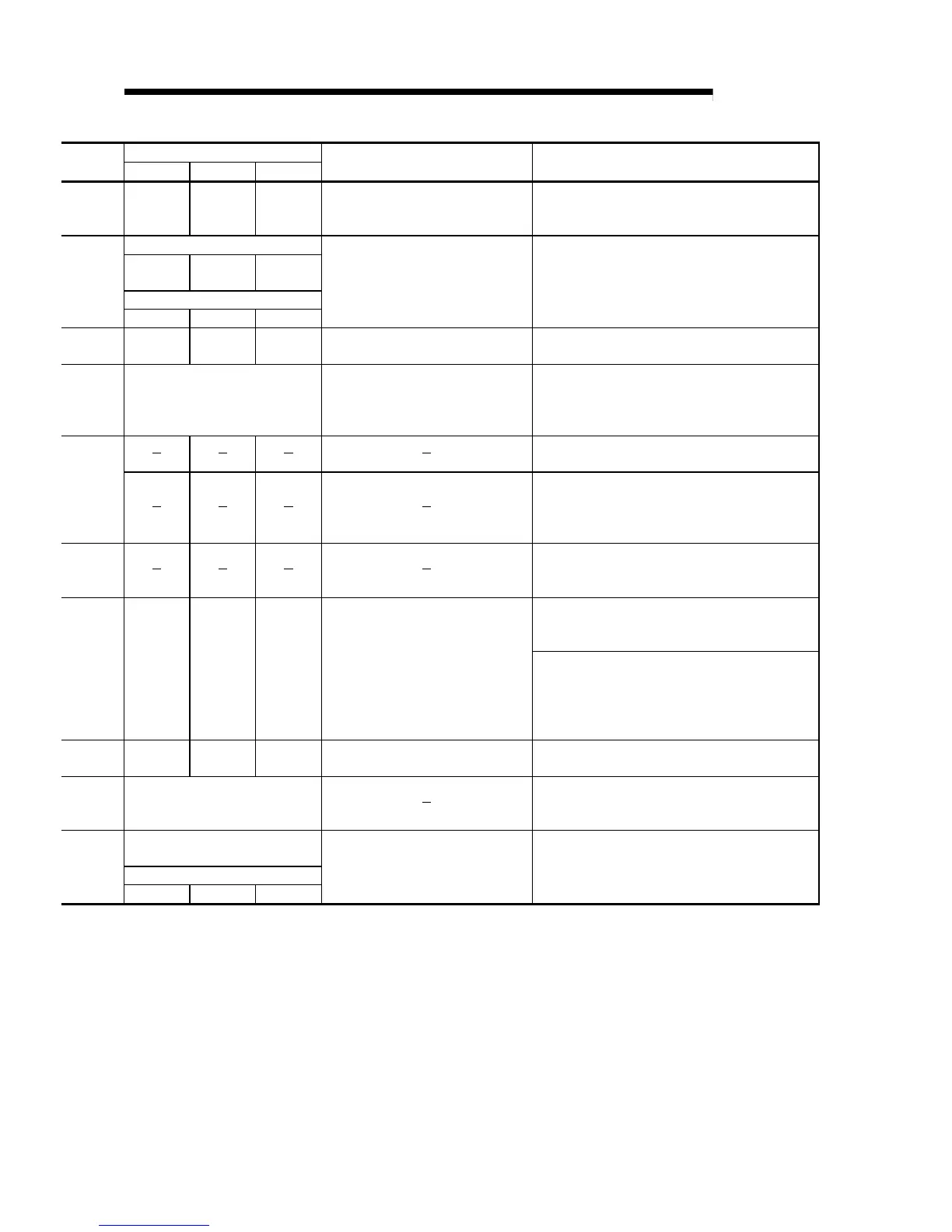
Relevant buffer memory address
Axis 1 Axis 2 Axis 3
Setting range
(Setting given in sequence program)
Remedy
1158 1208 1258
<Speed change request>
1: Speed change request
Do not change the speed during deceleration or
stoppage caused by a stop command or during
automatic deceleration under position control.
New speed value
1156
1157
1206
1207
1256
1257
Speed limit value
6, 7 156, 157 306, 307
<New speed value, speed limit value>
1 to 1000000 [pulse/s]
1 to 600000000 [mm/min, etc.]
Change the new speed to a value within the range from
0 to the “speed limit value.”
1153 1203 1253
<M code OFF request>
1: The M code ON signal is turned OFF.
Correct the ON/OFF timing of the “M code OFF
request.” (Refer to section 12.6.3)
Refer to section “5.3 List of positioning
data.”
<Operation pattern>
00: Positioning complete
01: Continuous positioning control
11: Continuous path control
Specify the end of operation at the 50th point. (Refer to
Chapter 10)
Reduce the FOR to NEXT nesting structure to one.
(Refer to section 10.3.9)
Do not turn ON the speed/position changeover signal
during acceleration.
(Refer to section 9.2.9)
Issue a speed change request at a position where the
sufficient remaining distance is left.
Do not specify “1: Step continue” in the “step waiting”
axis status.
1174 1224 1274
<Step start information>
0: End of reception of step start
1: Step continue
2: Restart
Do not set "1: Step continue" or "2: Restart" in the axis
operation status of "step error occurring", "error
occurring", "waiting", "stopped", "servo has not been
connected" or "in servo OFF".
62 212 362
<External start function selection>
0, 1, 2
Change “external start function selection” in detail
parameter 2 to within the setting range.
Refer to section “5.3 List of positioning
data.”
Change the positioning data to an address or
movement amount sufficient for deceleration.
Refer to section “5.3 List of positioning
data” for the command speed.
Speed limit value
6, 7 156, 157 306, 307
<Command speed, speed limit value>
1 to 1000000 [pulse/s]
1 to 600000000 [mm/min, etc.]
Change the command speed to within the setting
range.

 Loading...
Loading...







