Appendix - 12
MELSEC-A
APPENDICES
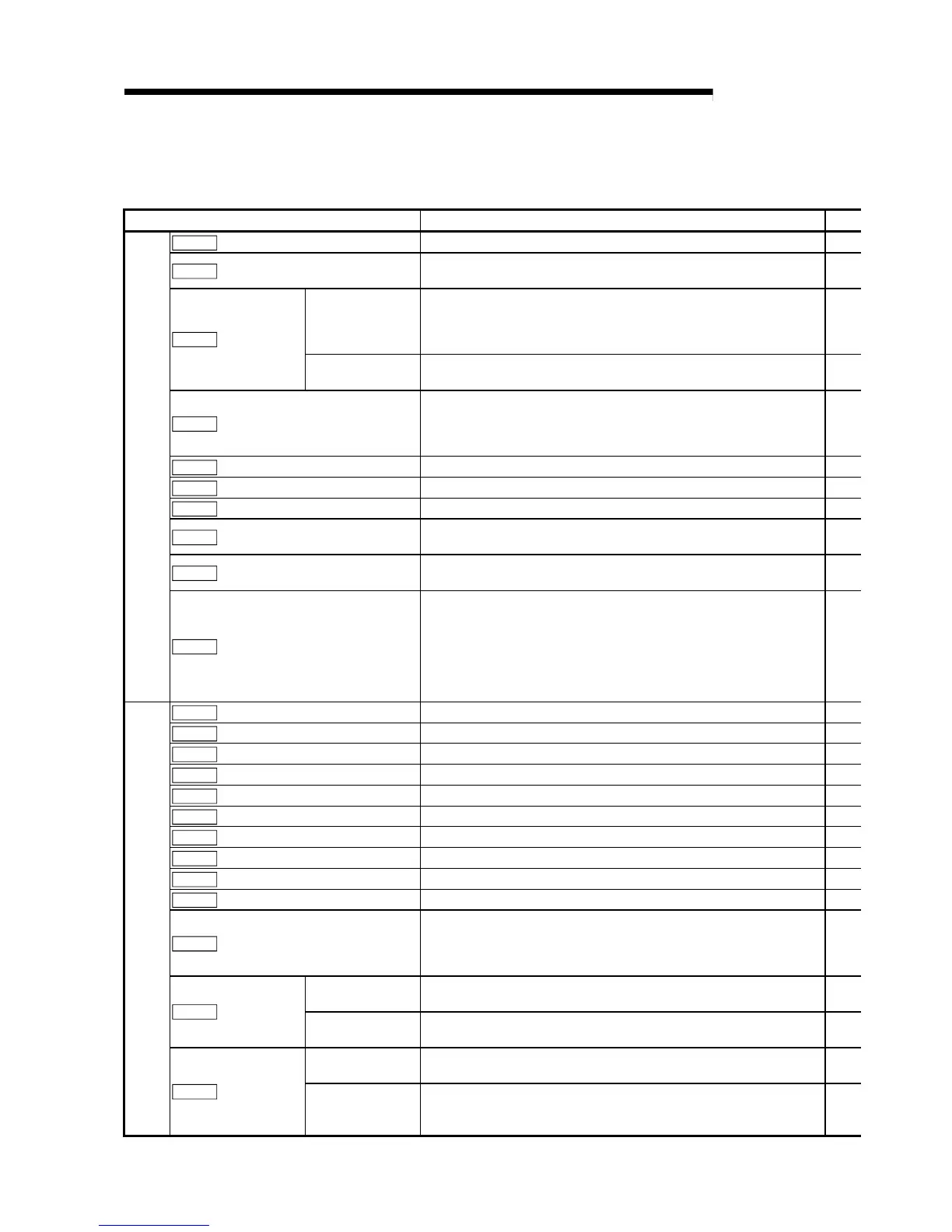
[2] Servo parameters
(1) Servo parameters for MR-H-B (MR-H-BN)
Item Setting range
Pr.100
Servo series 0: MR-H-B (MR-H-BN), 1: MR-J-B, 2: MR-J2-B, 1E: Other
Pr.101
Amplifier setting
0: Absolute position detection invalid
1: Absolute position detection valid
Regenerative
brake option
00: External regenerative brake option not used, 01: FR-RC, FR-BU,
02: MR-RB013, 03: MR-RB033, 05: MR-RB32, 06: MR-RB34,
07: MR-RB54, 08: MR-RB30, 09: MR-RB50, 0B: MR-RB31,
0C: MR-RB51, 0E: Standard + fan
Pr.102
Regenerative
brake resistor
External dynamic
brake selection
0: External dynamic brake invalid, 1: External dynamic brake valid
Pr.103
Motor type
0000
H
: HA-SH Standard, 0001
H
: HA-LH Low inertia,
0002
H
: HA-UH Flat, 0003
H
: HA-FH/HA-FF, 0005
H
: HA-MH,
0007
H
: HC-SF, 0008
H
: HC-RF, 0009
H
: HC-UF, 000A
H
: HC-FF,
000B
H
: HC-MF, 0080
H
: Automatic setting
Pr.104
Motor capacity 0000
H
to 9999
H
Pr.105
Motor speed 1 to 3
Pr.106
Feedback pulse 0: 16384pulse, 1: 8192pulse
Pr.107
Rotation direction
0: Forward run with positioning address increment
1: Reverse run with positioning address increment
Pr.108
Auto tuning
0: Auto tuning selected for use of interpolation axis control in position
control , 1: Auto tuning for ordinary operation, 2: Invalid
Servo basic parameters
Pr.109
Servo response setting
1: Normal (low response), 2: Normal (low/middle response),
3: Normal (middle response), 4: Normal (middle/high response),
5: Normal (high response), 8: Large friction (low response),
9: Large friction (low/middle response),
A: Large friction (middle response),
B: Large friction (middle/high response),
C: Large friction (high response)
Pr.112
Load inertia ratio 0.0 to 100.0%
Pr.113
Position loop gain 1 4 to 1000rad/s
Pr.114
Speed loop gain 1 20 to 5000rad/s
Pr.115
Position loop gain 2 1 to 500rad/s
Pr.116
Speed loop gain 2 20 to 8000rad/s
Pr.117
Speed integral compensation 1 to 1000 ms
Pr.118
Notch filter selection 0: Not used, 1: 1125, 2: 563, 3: 375, 4: 282, 5: 225, 6: 1881, 7: 161
Pr.119
Feed forward gain 0 to 100%
Pr.120
In-position range 0 to 50000pulse
Pr.121
Solenoid brake output 0 to 1000ms
Pr.122
Monitor output mode selection
0: Servomotor speed, 1: Torque, 2: Servomotor speed (+),
3: Torque (+), 4: Current command, 5: Command speed,
6: Droop pulse 1/1, 7: Droop pulse 1/4, 8: Droop pulse 1/16,
9: Droop pulse 1/32, A: Droop pulse 1/64
Carrier frequency
selection
0: 2.25KHz (Standard), 3: 9.0KHz (Low noise)
Pr.123
Option
function 1
Serial encoder
cable selection
0: 2-wire, 1: 4-wire (Supports long distance cables)
Motor-less
operation selection
0: Invalid, 1: Valid
Servo adjustment parameters
Pr.124
Option
function 2
Solenoid brake
interlock output
selection
0: Independent of motor speed (Output under specific condition)
1: Output under specific condition at motor speed of zero speed or
less

 Loading...
Loading...







