1-5 Contents of the Option equipment and special specification
1
General configuration
1.7 Contents of the Option equipment and special specification
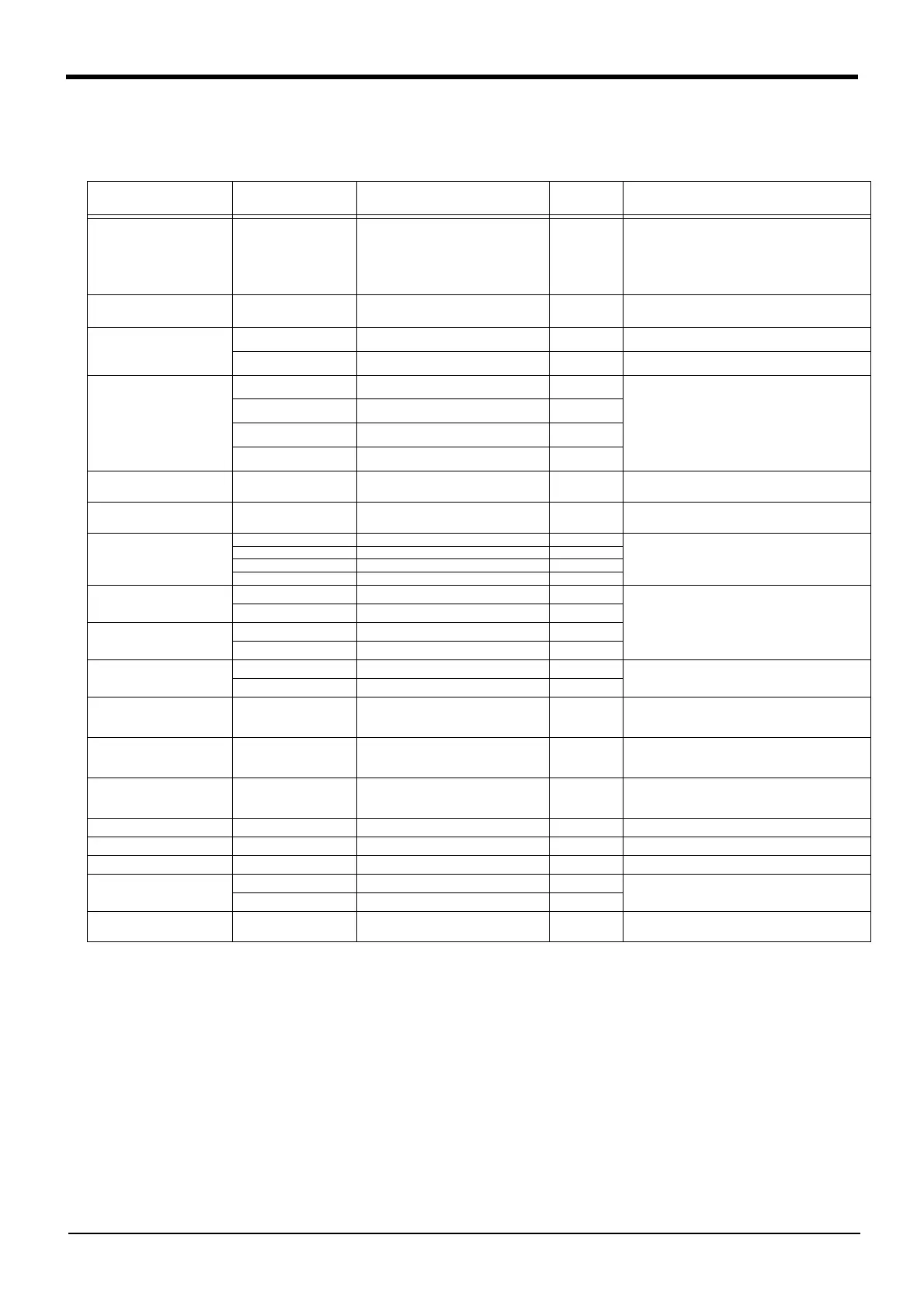
A list of all Optional equipments and special specifications are shown below.
Table 1-3 : The list of Option equipment and special specification
Item Type Specifications
Classification
Note1)
Note1) ○ : option, □ : special specifications.
Description
Stopper for changing the
operating range of the J1
axis
1S-DH-03
Stopper part
One each of the following can be
selected.
+ side: +120, +90, +60, or +30 deg.
- side: -120, -90, -60, or -30 deg.
±170 deg. are used for the standard
specification.
○
This must be installed by the customer.
Machine cable(Replaced
with shorter cable)
1S-02UCBL-03 For fixing
(Set of power and signal)
○・□
2m(A 2 m cable is supplied instead of the 5 m
cable that is supplied as standard)
Extended machine cable 1S- □□ CBL-03 For fixing
(Set of power and signal)
○ 5, 10, 15m
1S- □□ LCBL-03 For bending
(Set of power and signal)
○ 5, 10, 15m
Solenoid valve set 1S-VD01-02/
1S-VD01E-02
1 set (Sink type)/(Source type)
○
A solenoid valve set for the pneumatic hand
1S-VD02-02/
1S-VD02E-02
2 set (Sink type)/(Source type)
○
1S-VD03-02/
1S-VD03E-02
3 set (Sink type)/(Source type)
○
1S-VD04-02/
1S-VD04E-02
4 set (Sink type)/(Source type)
○
Hand output cable
1S-GR35S-01
Robot side: connector.
Hand side: wire.
○
The cable is connected to the hand output
connector by the customer.
Hand input cable
1S-HC25C-01
Robot side: connector.
Hand side: wire.
○
The cable is connected to the sensor by the
customer.
Hand curl tube 1E-ST0402C For solenoid valve 1set.:Φ4x2 ○
Curl type air tube
1E-ST0404C For solenoid valve 2set.:Φ4x4 ○
1E-ST0406C For solenoid valve 3set.:Φ4x6 ○
1E-ST0408C For solenoid valve 4set.:Φ4x8 ○
Simple teaching pendant R32TB Cable length 7m ○
With 3-position deadman switch IP65
R32TB-15 Cable length 15m ○
Highly efficient teaching
pendant
R56TB Cable length 7m ○
R56TB-15 Cable length 15m ○
Pneumatic hand interface 2A-RZ365 DO: 8 point
(Sink type) ○ It is necessary when the hand output signal of
the robot arm is used.
2A-RZ375 DO: 8 point
(Source type) ○
Controller protection box
Note2)
Note2) This is provided as standard for the specification with the controller protection box. Use this option to pro
-
tect the controller from the oil mist when the controller will be installed in the environment such as the oil
mist.
Only for the CR1QA-700 series controller of standard specification.
CR1D-MB IP54 □
The controller protection box is used to protect
the controller from an oil mist or other
operating environment
RT ToolBox2
(Personal computer Sup
-
port software)
3D-11C-WINE CD-ROM ○
MS-Windows2000/XP
/Vista
(With the simulation function)
RT ToolBox2 mini
(
Personal computer Sup
-
port software mini)
3D-12C-WINE CD-ROM ○ MS-Windows2000/XP/Vista
TU cable for robot 2Q-TUCBL □ M Cable length 05、 10、 20、 30m ○
For communication between robot CPU and DU.
DISP cable for robot 2Q-DISPCBL □ M Cable length 05、 10、 20、 30m ○ For communication between robot CPU and DU.
EMI cable for robot 2Q-EMICBL □ M Cable length 05、 10、 20、 30m ○ For a robot CPU emergency stop input.
SSCNET Ⅲ cable for robot MR-J3BUS □ M-A Cable length 05、 10、 20m ○
For the servo communication between robot CPU
and DU .
MR-J3BUS30M-B Cable length 30m ○
Instruction Manual
5S-QA00-PE01
RV-3SQ/3SQJ series
○
A set of the instructions manual bookbinding
editions

 Loading...
Loading...

