5 - 56
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
Setting value, setting range
Setting value buffer memory
address
Item
Value set with peripheral
device
Value set with sequence program
Default
value
Axis 1 Axis 2 Axis 3 Axis 4
Pr.53
OP shift amount
The setting value range differs depending on the
Pr.1
Unit setting.
Here, the value within the [Table 1] range is set.
[Table 1] on right page
0
84
85
234
235
384
385
534
535
Pr.54
OPR torque limit value
1 to 300 (%) 1 to 300 (%) 300 86 236 386 536
0 : OPR speed 0
Pr.56
Speed designation
durin
OP shift
1 : Creep speed 1
0 88 238 388 538
Pr.57
Dwell time during
OPR retry
0 to 65535 (ms)
0 to 65535 (ms)
0 to 32767 :
Set as a decimal
32768 to 65535 :
Convert into hexadecimal and set
0 89 239 389 539
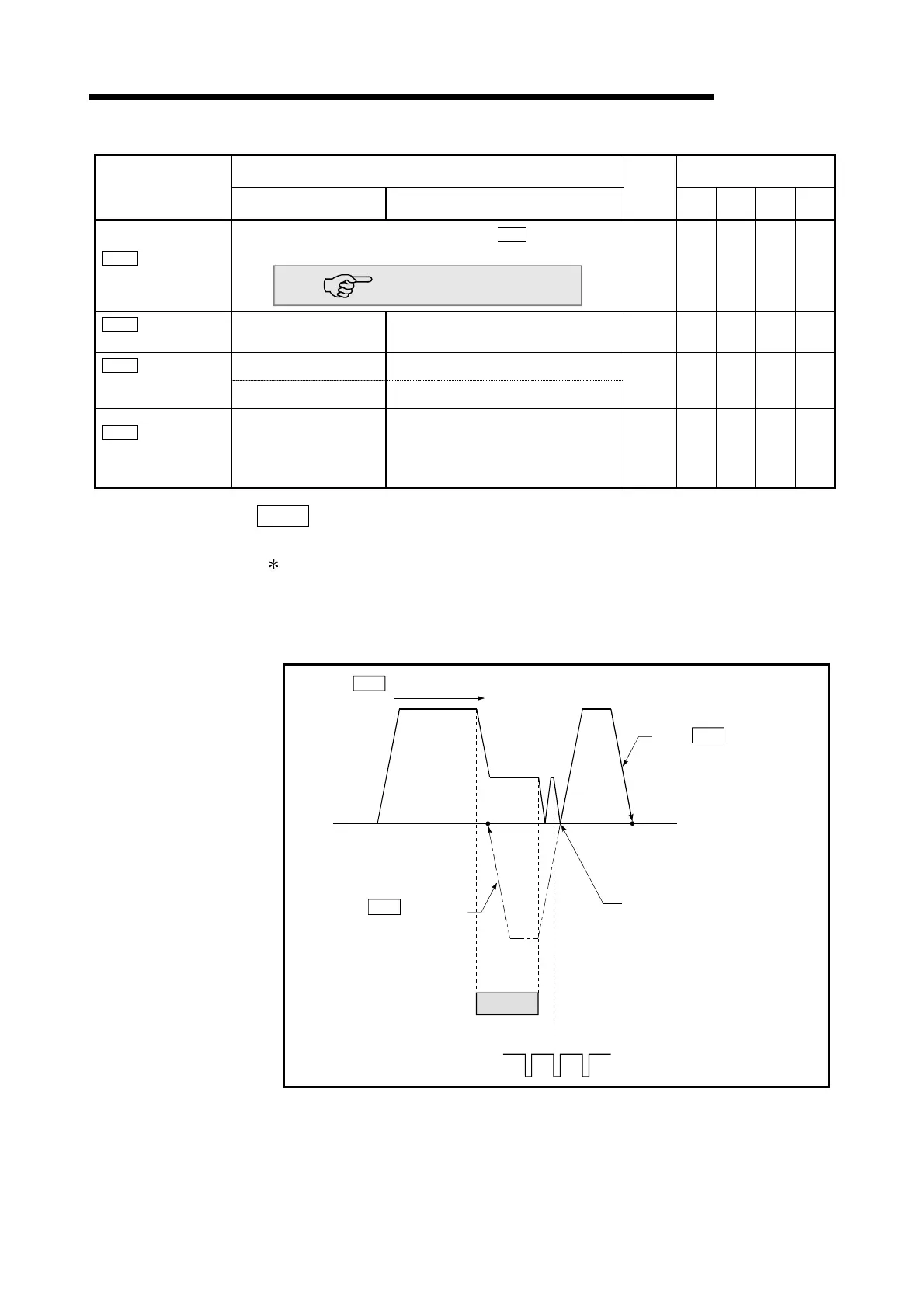
Pr.53
OP shift amount
Set the amount to shift (move) from the position stopped at with OPR.
The OP shift function is used to compensate the OP position stopped at with
OPR.
If there is a physical limit to the OP position, due to the relation of the near-point
dog installation position, use this function to compensate the OP to an optimum
position.
OPR direction
When OP
shift amount is positive
Shift point
Shift point
When OP
shift amount is negative
Start point
Shift after deviation
counter clear is canceled
Near-point dog signal
Zero signal
Pr.53
Pr.53
Pr.44
 Loading...
Loading...