11 - 8
MELSEC-Q
11 MANUAL CONTROL
11.2.3 Setting the required parameters for JOG operation
The "Positioning parameters" must be set to carry out JOG operation.
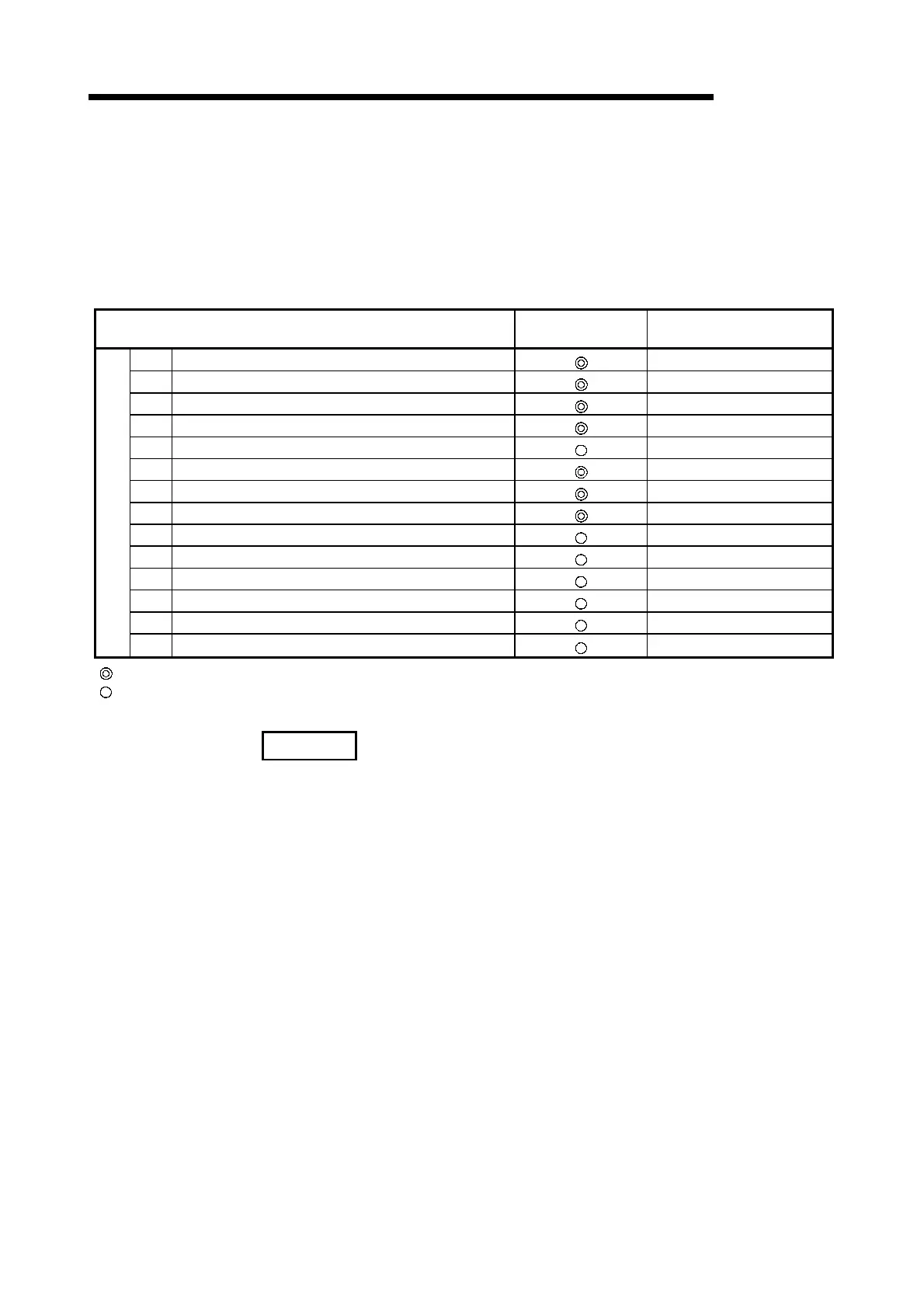
The following table shows the setting items of the required parameters for carrying out
JOG operation. When only JOG operation will be carried out, no parameters other than
those shown below need to be set. (Use the initial values or setting values within a
range where no error occurs for trouble-free operation.)
Setting item Setting requirement
Factory-set initial value
(setting details)
Pr.1 Unit setting
3 (PLS)
Pr.2 No. of pulses per rotation (Ap) (Unit: PLS)
20000
Pr.3 Movement amount per rotation (Al) (Unit: PLS)
20000
Pr.4 Unit magnification (Am)
1 (1 times)
Pr.7 Bias speed at start (Unit: PLS/s)
0
Pr.8 Speed limit value (Unit: PLS/s)
20000
Pr.9 Acceleration time 0 (Unit: PLS/s)
1000
Pr.10 Deceleration time 0 (Unit: PLS/s)
1000
Pr.11 Backlash compensation amount (Unit: PLS)
0
Pr.12 Software stroke limit upper limit value (Unit: PLS)
2147483647
Pr.13 Software stroke limit lower limit value (Unit: PLS)
–2147483648
Pr.14 Software stroke limit selection
0 (current feed value)
Pr.15 Software stroke limit valid/invalid setting
0 (valid)
Positioning parameters
Pr.17 Torque limit setting value (Unit: %)
300
: Setting always required.
: Set according to requirements (Leave set to the initial value when not used.)
REMARK
•
Positioning parameter settings work in common for all control using the QD75.
When carrying out other control ("major positioning control", "high-level positioning
control", "OPR positioning control"), the respective setting items must also be
matched and set.
•
Parameters are set for each axis.
•
Refer to "Chapter 5 Data Used for Positioning Control" for setting details.
 Loading...
Loading...