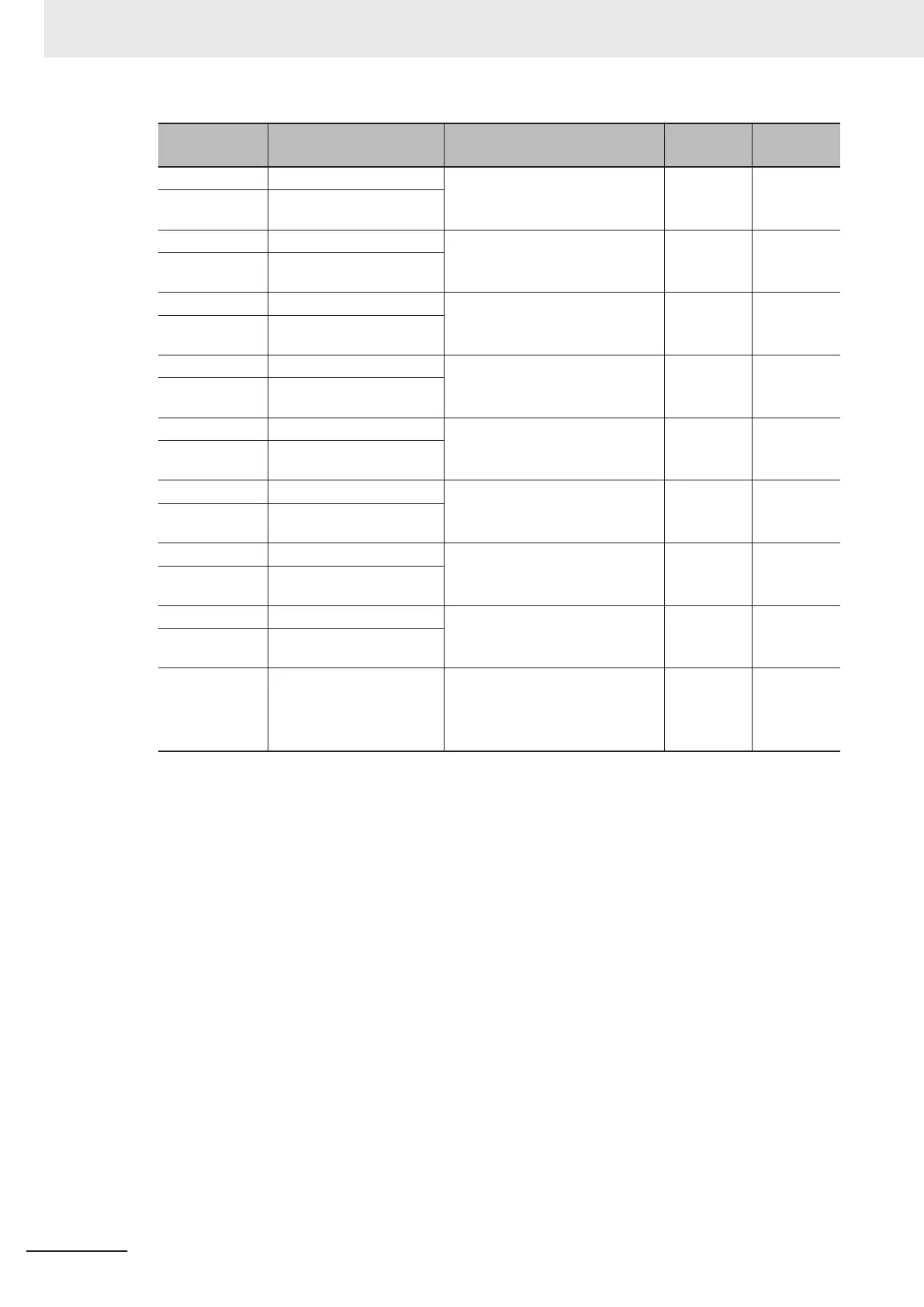
Parameter No. Function name Data
Default da-
ta
Unit
d244 Positioning Data 1 (MSB) −268435455 to 268435455
(MSB: -4,096 to 4,095, LSB: 0 to
65,535)
0 -
d245 Positioning Data 1 (LSB)
d246 Positioning Data 2 (MSB) −268435455 to 268435455
(MSB: -4,096 to 4,095, LSB: 0 to
65,535)
0 -
d247 Positioning Data 2 (LSB)
d248 Positioning Data 3 (MSB) −268435455 to 268435455
(MSB: -4,096 to 4,095, LSB: 0 to
65,535)
0 -
d249 Positioning Data 3 (LSB)
d250 Positioning Data 4 (MSB) −268435455 to 268435455
(MSB: -4,096 to 4,095, LSB: 0 to
65,535)
0 -
d251 Positioning Data 4 (LSB)
d252 Positioning Data 5 (MSB) −268435455 to 268435455
(MSB: -4,096 to 4,095, LSB: 0 to
65,535)
0 -
d253 Positioning Data 5 (LSB)
d254 Positioning Data 6 (MSB) −268435455 to 268435455
(MSB: -4,096 to 4,095, LSB: 0 to
65,535)
0 -
d255 Positioning Data 6 (LSB)
d256 Positioning Data 7 (MSB) −268435455 to 268435455
(MSB: -4,096 to 4,095, LSB: 0 to
65,535)
0 -
d257 Positioning Data 7 (LSB)
d258 Positioning Data 8 (MSB) −268435455 to 268435455
(MSB: -4,096 to 4,095, LSB: 0 to
65,535)
0 -
d259 Positioning Data 8 (LSB)
d277
Positioning Data Setting
Selection via communica-
tion
0: Disable Communications Posi-
tioning Data (S20, S21)
1: Enable Communications Posi-
tioning Data (S20, S21)
0 -
Position Loop Gain 1 (low speed side) (d203), Position Loop Gain 2 (high
speed side) (d204)
Position Loop Gain Switch Frequency (d205)
Speed control P (gain) (d03,A45,b45,r45)
Speed control I (integral time) (d04,A46,b46,r46)
In orientation operation, the response of position control can be switched during deceleration and
during a stop.
The larger the set value, the more improved response becomes, the shorter the settling time be-
comes and the more holding performance can be improved during a servo lock stop. However, set-
ting too large a value causes hunting. Adjust this parameter so that hunting does not occur. Also,
when increasing the gain of the position controller, also adjust the speed adjuster (ASR). T
o switch
speed control P (gain) and speed control I (integral time), use parameter selection 1 and 2
“MPRM1” and “MPRM2.”
Electronic Gear Denominator (d206), Electronic Gear Numerator (d207)
Positioning data in orientation can be handled as an angle, number of pulses or other user value.
6 Vector Control and Applied Functions
6-54
M1 Series Standard Type User's Manual (I669)
 Loading...
Loading...


