3-59
3 Error Tables
NJ-series Troubleshooting Manual (W503)
3-1 Errors by Source
3
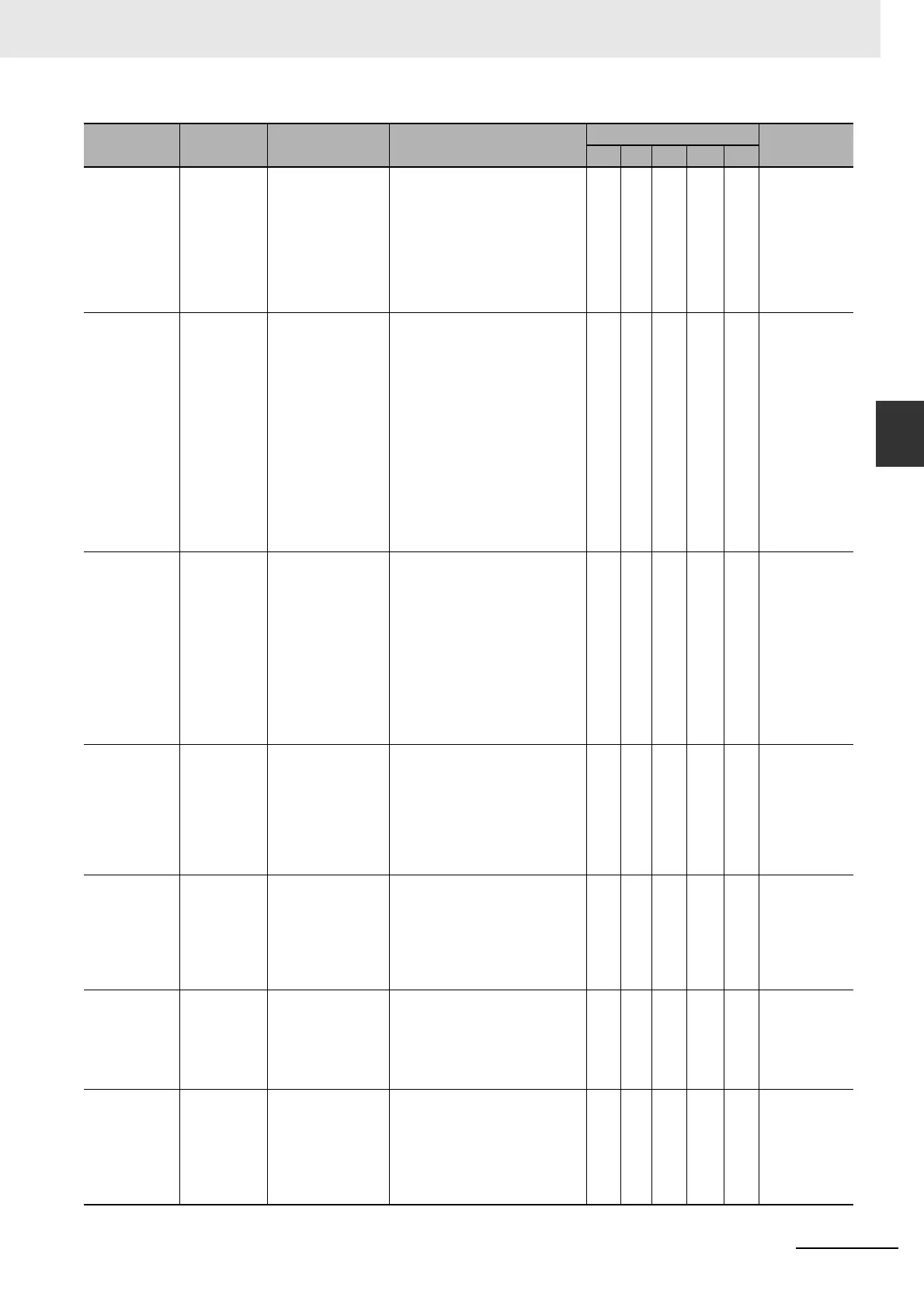
3-1-3 Errors in the Motion Control Function Module
54470000 hex Positioning
Gear Opera-
tion Insuffi-
cient Target
Velocity
For the
MC_GearInPos
(Positioning Gear
Operation) instruc-
tion, the target
velocity of the slave
axis is too small to
achieve the
required velocity.
• For the MC_GearInPos (Posi-
tioning Gear Operation) instruc-
tion, the value of the Velocity
(Target Velocity) input variable
is smaller than the master axis
velocity multiplied by the gear
ratio when the instruction was
executed.
S NJ-series
Motion Con-
trol Instruc-
tions
Reference
Manual (Cat.
No. W508)
54480000 hex Same Start
Point and
End Point for
Circular Inter-
polation
The start point and
end point were the
same when the
radius method was
specified for the
MC_MoveCircular2
D (Circular 2D
Interpolation)
instruction. Or, the
start point, end
point, and border
point were the
same when the bor-
der point method
was specified.
• The start point and end point
were the same when the radius
method was specified for the
MC_MoveCircular2D (Circular
2D Interpolation) instruction.
• The start point, end point, and
border point were the same
when the border point method
was specified for the
MC_MoveCircular2D (Circular
2D Interpolation) instruction.
S Same as
above.
54490000 hex Circular Inter-
polation Cen-
ter
Specification
Position Out
of Range
The position speci-
fied for the center
point exceeded the
allowed range when
the center method
was specified for
the
MC_MoveCircular2
D (Circular 2D
Interpolation)
instruction.
• The difference between the dis-
tance from the start point to the
center point and the distance
between the end point to the
center point exceeded the per-
mitted value specified for the
correction allowance ratio in the
axes group settings when the
center designation method was
specified for the
MC_MoveCircular2D (Circular
2D Interpolation) instruction.
S Same as
above.
544A0000 hex Instruction
Execution
Error Caused
by Count
Mode Setting
An instruction that
cannot be used
when the Count
Mode is set to
Rotary Mode was
executed for an axis
that was set to
Rotary Mode.
• An instruction that cannot be
used when the Count Mode is
set to Rotary Mode was exe-
cuted for an axis that was set to
Rotary Mode.
S Same as
above.
544C0000 hex Parameter
Selection Out
of Range
The parameter
specified for the
ParameterNumber
input v
ariab
le to a
motion control
instruction is out of
range.
• Instruction input parameter
exceeded the valid range of the
input variable.
S Same as
above.
544D0000 hex Stop Method
Selection Out
of Range
The parameter
specified for the
StopMode input
variable to a motion
control instruction is
out of range.
• Instruction input parameter
exceeded the valid range of the
input variable.
S Same as
above.
544E0000 hex Latch ID
Selection Out
of Range for
Trigger Input
Condition
The parameter
specified for the
TriggerInput::Lat-
chID input variable
to a motion control
instruction is out of
range.
• Instruction input parameter
exceeded the valid range of the
input variable.
S Same as
above.
Event code Event name Meaning Assumed cause
Level
Reference
Maj Prt Min Obs Info

 Loading...
Loading...












