1 Features and System Configuration
1 - 4
NX-series Position Interface Units User’s Manual (W524)
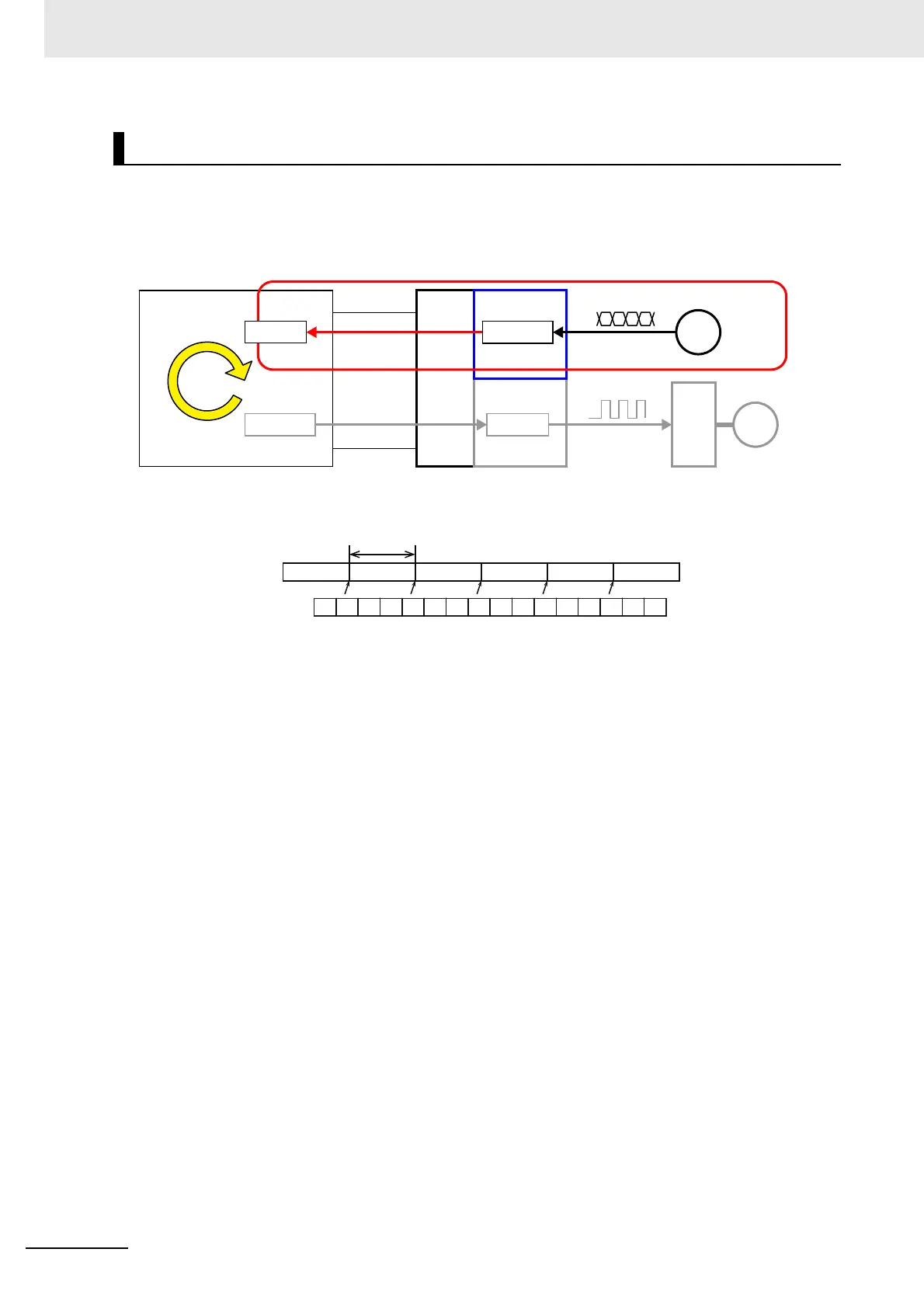
The SSI Input Units convert serial data from an SSI interface-compatible absolute encoder or linear
encoder to obtain the absolute position.
Use an SSI Input Unit to enable the Controller to identify control positions based on the absolute posi-
tion information obtained from the target device.
*1. The count value of the encoder (serial data) is sent to the Controller every control period.
Features
• You can connect to an absolute encoder with an SSI interface.
• A baud rate (synchronous clock of SSI communications) of up to 2.0 MHz is supported.
• Either one or two SSI input ports are provided. Each port can be set up with independent function-
ality.
SSI Input Units
Controller
Count value
Control
(synchronization)
period
Target position
Example:
EtherCAT
EtherCAT
Coupler
Unit
Data conversion
SSI input
Pulse output
Pulse generation
Pulses
Motor and drive
Encoder
Serial data
*1
014710
...
Controller
count value
Control period
0123456789101112
... ... ...
Count valueUnit
(serial data)