5-33
5-6 Fully-closed Control
OMNUC G5-SERIES AC SERVOMOTOR AND SERVO DRIVE USER'S MANUAL
5
Basic Control Mode
External Feedback Pulse Dividing Ratio Setting (Pn324, Pn325)
Set the dividing ratio for the encoder resolution and external encoder resolution.
Check the number of encoder feedback pulses and the number of external encoder output
pulses per motor rotation, and set External Feedback Pulse Dividing Numerator (Pn324) and
External Feedback Pulse Dividing Denominator (Pn325) so that the following formula works
out.
If this divider setting is wrong, there will be deviations between the position calculated from
encoder pulses and the position calculated from external encoder. If the movement distance
is long, these deviations accumulate and cause an internal/external feedback pulse error
counter overflow level error.
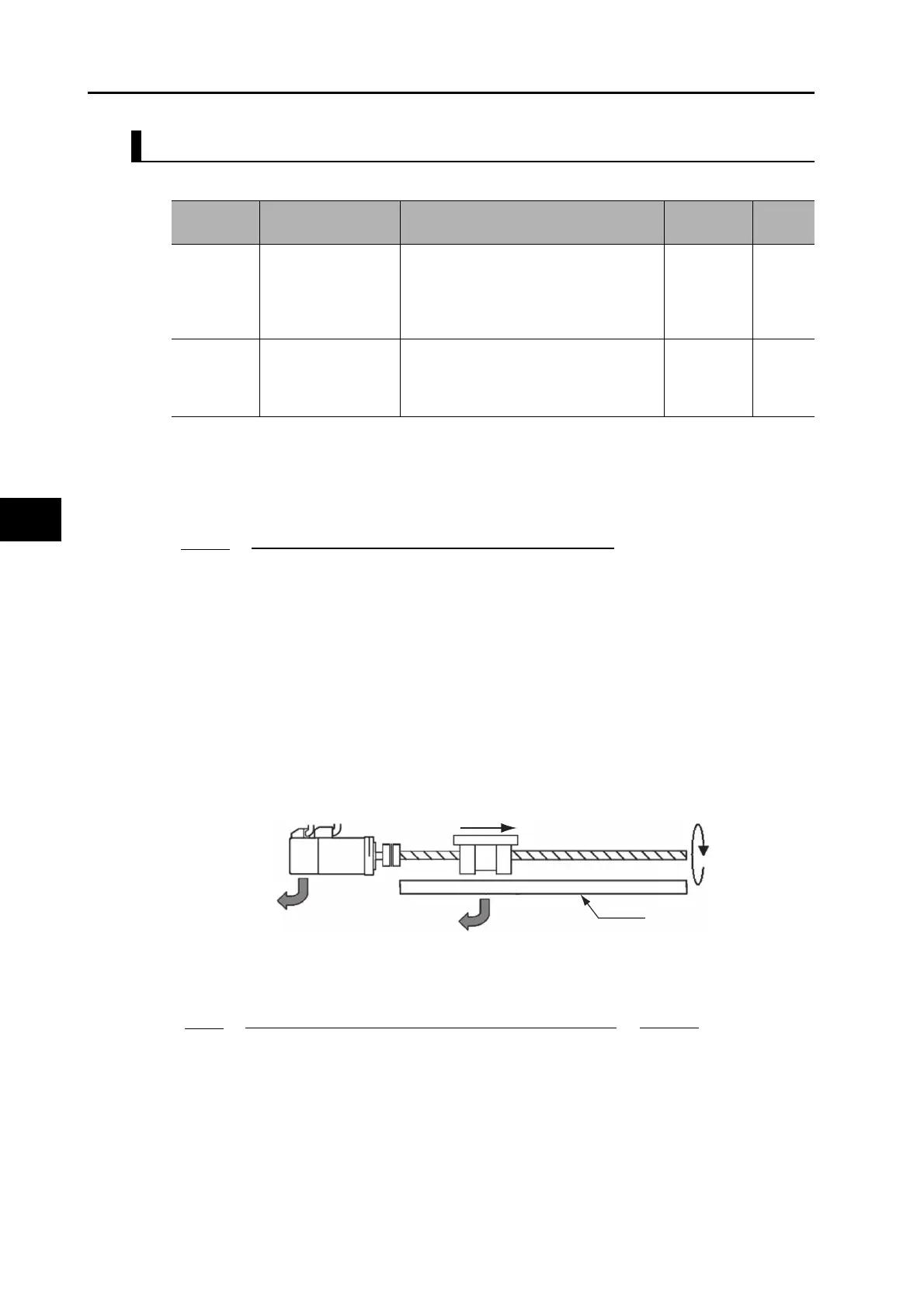
Setting Examples
Ball screw pitch: 10 mm
External encoder resolution: 0.1 μm
Encoder resolution: 20 bits
Parameter
number
Parameter name Explanation
Setting
range
Unit
Pn324
External Feedback
Pulse Dividing
Numerator
Set the numerator of the external
encoder divider setting. Normally, set the
number of encoder output pulses per
motor rotation. If the set value is 0, the
encoder resolution is set automatically.
0 to 2
20
-
Pn325
External Feedback
Pulse Dividing
Denominator
Set the denominator of the external
encoder divider setting. Normally, set the
number of external encoder output
pulses per motor rotation.
1 to 2
20
-
Pn324 Number of encoder output pulses per motor rotation
=
Pn325 Number of external encoder output pulses per motor rotation
Servomotor
encoder resolution: 20 bits/rotation
10 mm
Ball screw
Ball screw pitch 10 mm
1 Rotation
External encoder
resolution: 0.1
μ
m
External Encoder Output Pulse Per Motor Rotation (Pn325)
10 [mm] / 0.1 [
μ
m/pulse]
=
100,000 [pulses]
Encoder Output Pulses per Motor Rotation (Pn324)
20 bits
=
1,048,576
Pn324 Number of encoder output pulses per motor rotation 1,048,576
= =
Pn325 Number of external encoder output pulses per motor rotation 100,000
 Loading...
Loading...
