RFTSeries|6AxisForceTorqueSensor
©ROBOTOUSCo.,Ltd.www.robotous.com|support@robotous.com
9
Step 2. Receive a corresponding response packet and check whether there was an error in processing the
command.
Step 3. Send the command “Start F/T Data Output”.
Step 4. Receive force and torque data from the sensor.
How to set a parameter while measuring force and torque.
Step 1. Send the command “Stop F/T Data Output” [Command ID = 12(0x0C)]
Step 2. Send a command for setting a parameter.
Step 3. Receive a corresponding response packet and check whether there was an error in processing the
command.
Step 4. Send the command “Start F/T Data Output”.
Step 5. Receive force and torque data from the sensor.
How to set bias while measuring force and torque
Step 1. Send the command “Start F/T Data Output” [Command ID = 11(0x0B)].
Step 2. Send the command “Set Bias” [Command ID = 17(0x11)]
Step 3. Receive force and torque data from the sensor.
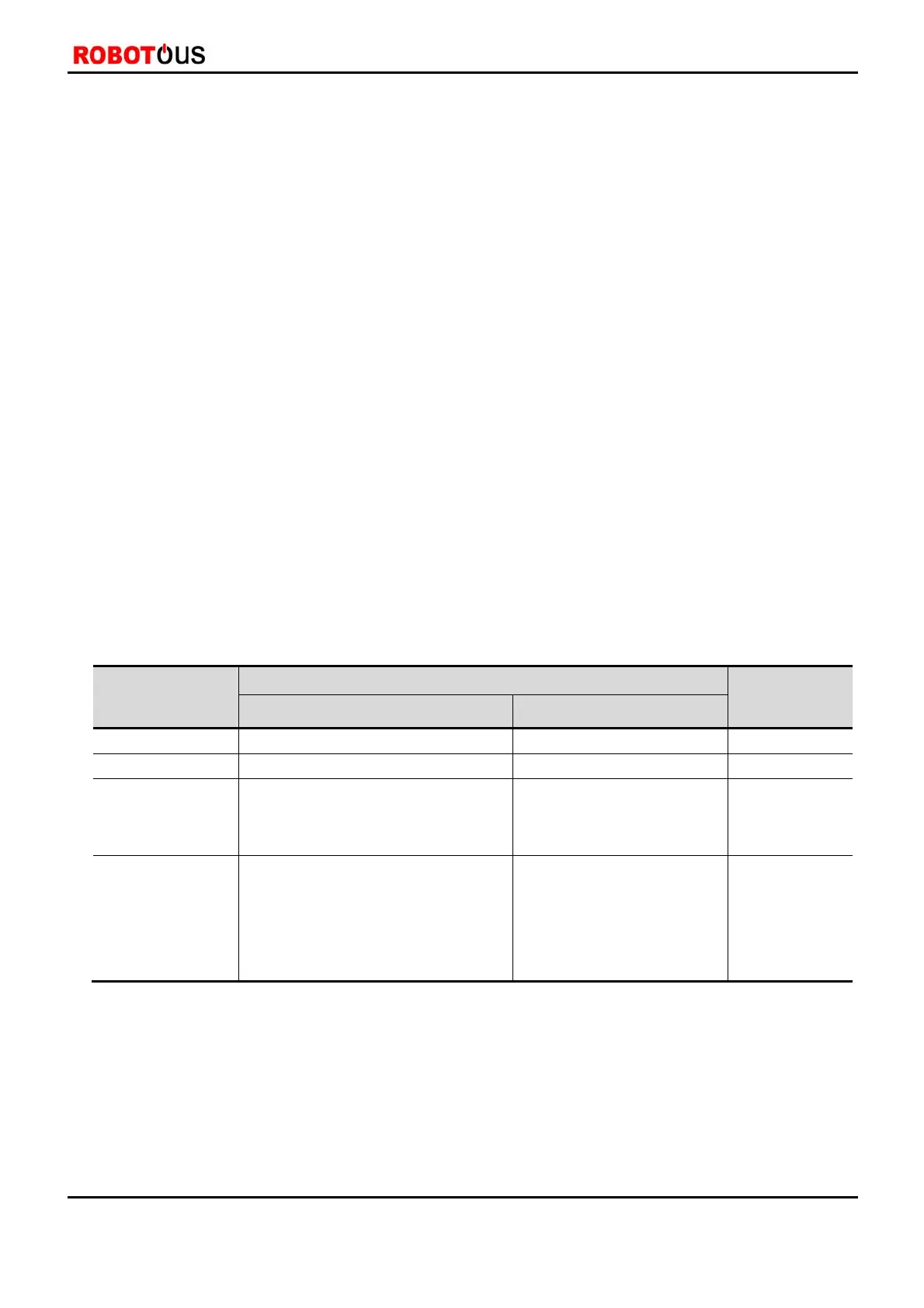
3.4. Default Setting of Communication
Item
Default Values
Remarks
CAN UART
Filtering Filter OFF Filter OFF
Data Output Rate 200Hz 200Hz
Message ID
Receiver ID : 100(0x64)
Transmitter ID #1: 1(0x01)
Transmitter ID #2: 2(0x02)
N/A CAN only
Communication
Setting
CAN 2.0 A, B Compatible
Identifier: Standard Identifier
Bit Rate: 1Mbps
Size of Data: 8 Bytes
Baud Rate: 115,200bps
1 Stop Bit
No Parity
No Flow Control
Data Length: 8 Bits