1.4
RELIABILITY !jPECIFICATIONS
Bit jilter reduction determines the relationship between the leading
edge of READ DATA and the center of the data window.
The specified Read error rates arc: based on the following bit jilter
specification. Ihe data separator must provide at least - 40 dB of bit
jilter reductio n at 2F with an offset error of less than LSnsc:c shift
from the center of the data window.
A medial defea is a Read error when data, which bas been correctly
wrilten, cannat be recovered within 16 retries.
A printout wimlbe provided with each drive listing the location of any
defect by head, cylinder, sector and byte. It will also specify the
number of bytles from the Index pulse. •
There: will be, no more than eight (S) defects per surface for a max-
imum total of thirty-two (32) per drive. Cylinder Zero will be free of
defects.
8.2
IIIOI'OlAA
""TOIl
DRIVERS
IIIPOI.AA
""TOIl
""""AS
POWEll
NS(
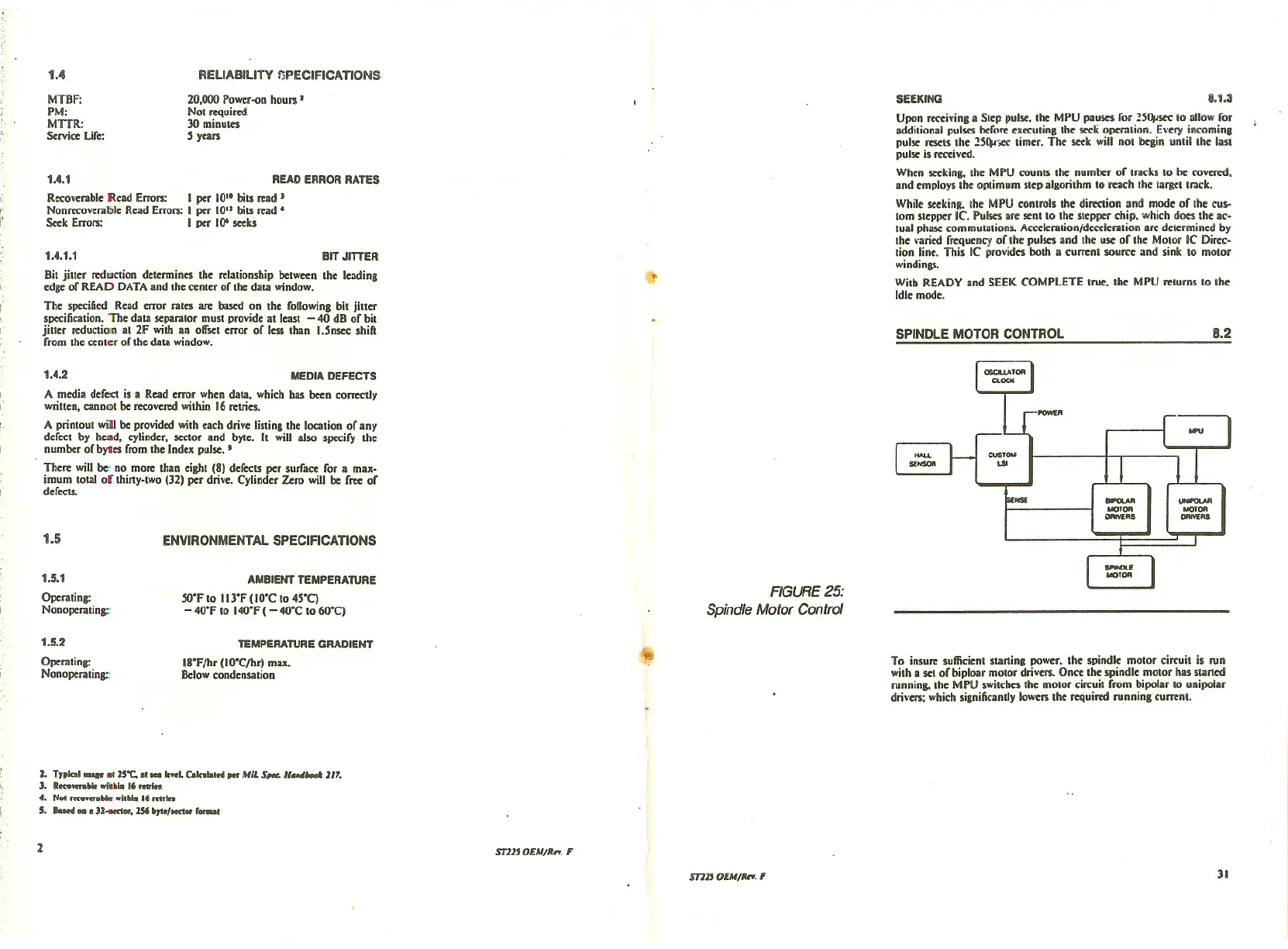
SPINDLE MOTOR CONTROL
SEEKING 8.1.3
Upon rc:ceh'ing Ii S.eppulse •• he MPU pauses for :!S(\.rsc:c10 allow for
additional pulses befol'Cexecuting the seeli operalion. Every incomin.
pulse reselS the
:!S~;C:C timer. The 5eek will nOI begin unlil Ihe lasl
pulse is received.
When sc:c:king.Ihe MPU counts the number of tracks to be covered.
and employs the optimum step algorithm to mlch Ihe largetlrack.
While seeking. Ihe MPU conlrols the direction and mode of the cus-
tom stepper
Ie. Pulses are sent to the stepper chip. which does the ac-
tual phase commulations. Acttleralion/deceleration are delermined by
the varied frequency of the pulses and .he use of the MOlor IC Direc-
tion line. This IC provides both
Ii curreni source and sink iO molor
windings.
With READY and SEEK COMPLETE true. the MPU re.urns \0 the
Idle mode.
~,
BIT JmER
MEDIA DEFECTS
20,000 Power-on hours I
Not required
30 minu\c:S
S yc:an
READ ERROR RATES1.4.1
MTBF:
PM:
MTTR:
Service ufe:
Recoverable Read Errors: I per 10" bits read J
Nonrecoverable Read Errors: I per 10" bits read •
Seek Errors: I per 10- sc:c:ks
1.4.1.1
1.4.2
I'
1.5
1.5.1
Operating:
Nonoperating::
ENVIRONMENTAL SPECIFICATIONS
AMBIENT TEMPERATURE
SO'F
to 113'F (lO'C to 4S'Q
- 4O'F to 140'F ( - 4O'C to 6O'C)
FIGURE 25:
Spindle Motor Control
1.5.2
Operating:
Nonoperating:'
TEMPERATURE GRADIENT
IS'F /br (lO'C/hr) max.
Below condensation
'19
To insure sufficienl staning power. the spindle motor circuil is run
with a set of biploar motor drivers. Once the spindle motor has started
running, Ihe MPU switches the motor circuit from bipolar
10 unipolar
drivers; which significantly lowers the required running currenl.
1. T,rIca'_., 25'C, 8' _ ••••L Colaoto' ••• potMiL S,... H__ 111.
J. R•••••••••• wt.~1oo•• mrIn
4. N•••••••••• w. ••II~I•• 6 mrIn
5•••••••••• 31.-1", 256.,../_ •• r•••••
2
ml' DEMIR"". F
ST11' DEMIR,., F
31