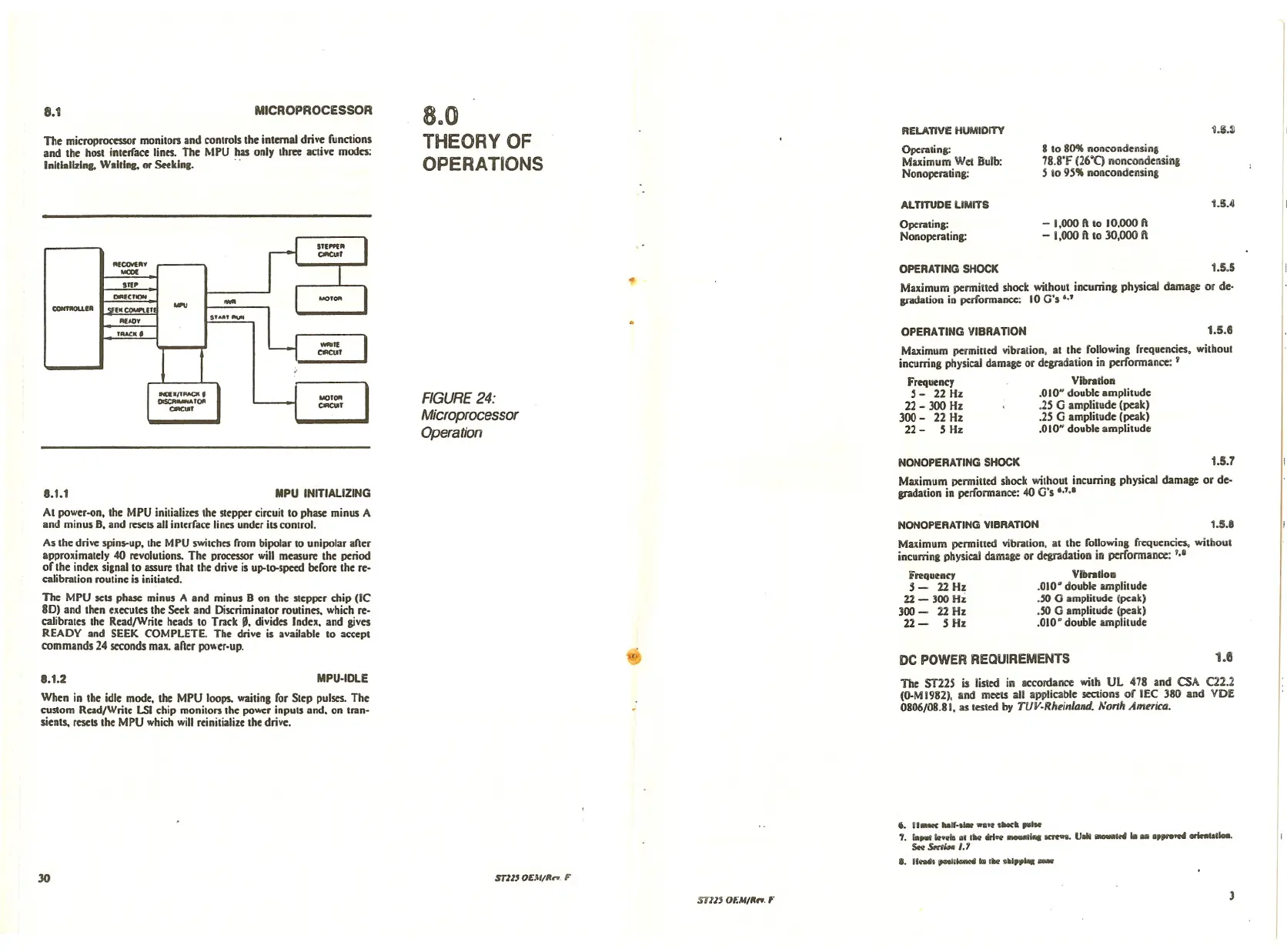
The microprocessor monitors and controls the internal drive runClions
and the host interrace lines. The MPU has only three active modes:
Initializing. W.ltlng. or Sftklnl •..
8.1
MICROPROCESSOR
8.0
THEORY OF
OPERATIONS
RELATIVE HUMIDITY
Opei'ating:
Maximum Wet Bulb:
Nonoperating:
8 to 80% noncondensing
78.8'F (26'C) noncondensiili
5 to 95~ nOilcoildeilsing
U.3I
Maximum permitted shock without incurring physical damage or de·
gradation in performance: 10 G's ."
Maximum permined vibration, at the rollowing rrequencies. without
incurring physical damage: or degradation in perrormance: '
Frequency Vibration
5 - 22 Hz .01OHdouble amplitude
22 - 300 Hz .25 G amplitude (peak)
300 - 22 Hz .25 G amplitude (peak)
22 - 5 Hz .01Owdouble: amplitude
U,iJ
1.5.5
1.5.6
- 1,000 ft to 10,000 ft
- 1,000 ft to 30,000 ft
OPERATING VIBRATION
AlTITUDE LIMITS
Operating:
Nonoperating:
OPERATING SHOCK
••
FIGURE 24:
Microprocessor
Operation
-
su., •..••
-.
NCO'i'I.fIIf
~
.-!!!!-
DIRECtION
CON'''1I11 Iot:IF~,
~
'RACK •
NONOPERATING SHOCK
1.5.7
a.1.1 MPU INITIALIZING
Maximum permitted shock without incurring physical damage or de·
gradation in performance: 40 G's -,'.'
Maximum permitted vibi'ation, at the rollowing rrequencies, without
incurring physical damage or degmdation in perronnancc:
',I
IFnquenc)' Vlbratloll)
5 - 22 Hz .010' double amplitude
22 - 300 Hz .50 G amplitude (peak)
300 - 22 Hz .50 G amplitude (peak)
22 - 5 Hz .010' double amplitude
At power-on, the MPU initializes the stepper circuit to phase minus A
and minus B, and resets all interrace lines under its control.
As the drive spins-up, the MPU switches rrom bipolar to unipolar aRer
approximately 40 revolutions. The processor will measure the period
or the index signal to assure that the drive is up-to-speed berore the re-
calibration routine is initiated.
The MPU sets phase minus A and minus B on the stepper chip (lC
80) and then executes the Seek and Discriminator routines. which re-
calibrates the Read/Write heads to Track
19, divides Index, and gives
READY and SEEK COMPLETE. The drive is available to accept
commands 24 seconds max. aRer polAer-up.
~
NONOPERATING VIBRATION
DC POWER REQUIREMENTS
1.5.8
1.(1
When in the idle mode, the MPU loops. waiting ror Slep pulses. The
custom Read/Write LSI chip monitors the power inputs and. on tran-
sients, resets the MPU which will reinitialize the drive.
a.1.2
MPU·IDLE
The ST22S is listed in accordance with UL 478 and CSA C22.2
(O-MI982), and meets all applicable sections or IEC 380 and VDE
0806/08.81, as tc:stedby
TUV-Rhf!infand. North Amf!rica.
i. 11_ •••••.••••".,•••••••••••••
7. S.p<ot 10•••• ot , ••• rI•• _' ••••••••••• Villi _"", ••••• ,,.. ••••••••••••••
s.. s.m••••1.7
•. lioMlt"",.'-"1 ••,•••• 1,,1•• _
JO
STll' OEM/II ••. F
STllS OEMI"", F
J