General information
Configuring SIRIUS Innovations
Configuration Manual, 04/2010, A8E56203880102-02
15
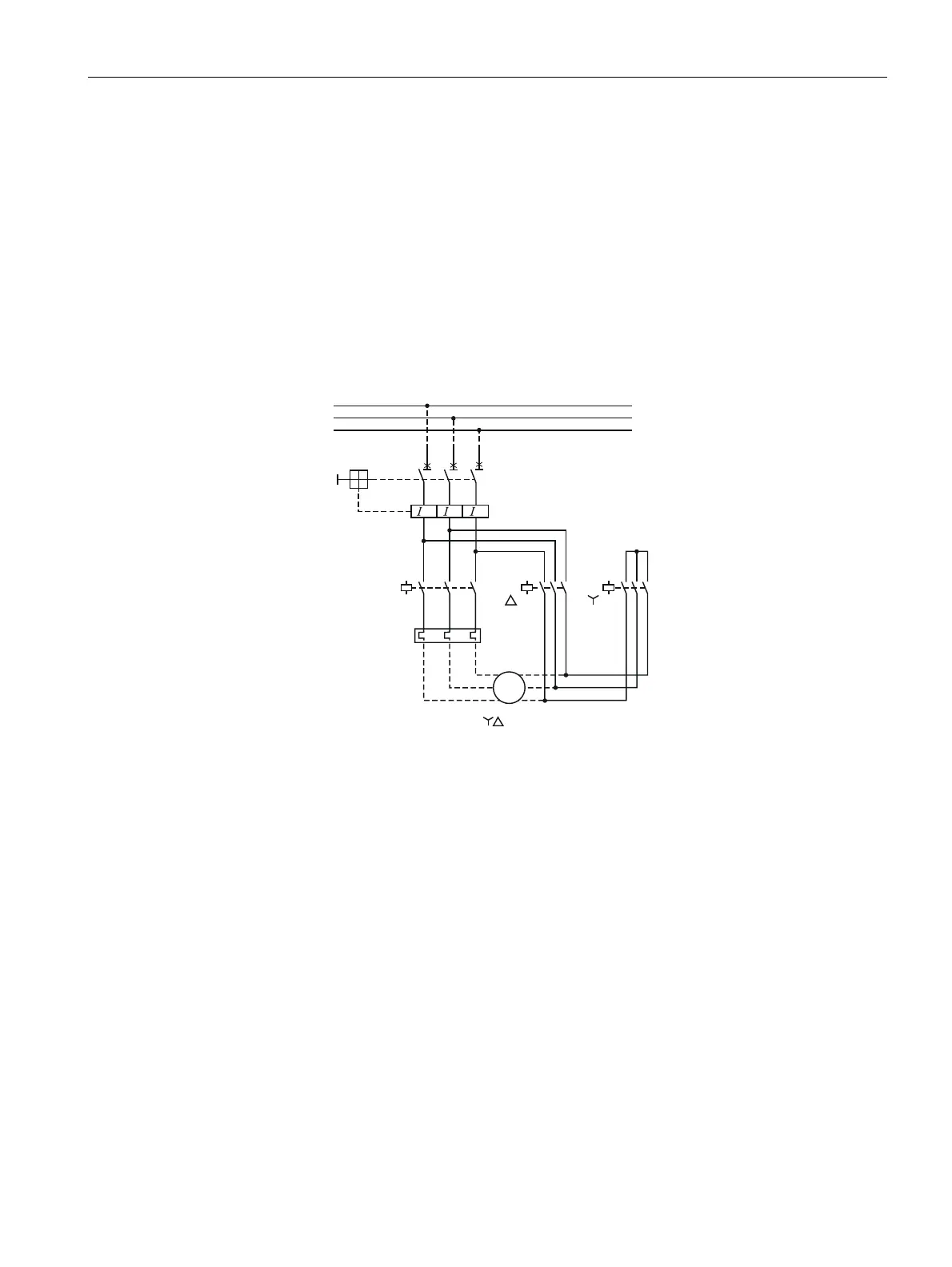
Star(wye)(Y)-delta function(Δ) starting
In order to keep the current peaks in the line supply as low as possible, contactor assembly
are frequently used as star(wye)-delta starters to start three-phase motors. However, to
make worthwhile use of YΔ starting, a low load torque is required during starting. Only then
can the motor approximately reach its rated speed in the Y stage before switching to
Δ operation.
An overload relay should be used for motor overload protection. Normally, this is located
directly in the motor feeder cable U1, V1, W1, as shown in the circuit diagram. Using this
arrangement, the overload protection is effective in both the Y and Δ circuit. The overload
relay should be set for 58% of the rated motor current.
K1
N
K2
6
1 3 5
2 4 6
K3
1 3 5
2 4 6
F1
NSB0_01770
W1
V1
U1
W2
V2
U2
M
3~
2
4
5
1
3
>>>
L1
L2
L3
Q1
Circuit diagram main circuit for circuit
The control current wiring and switching from Y to Δ are implemented with plug-on function
modules for the SIRIUS innovations. The switching time can be set between 1 and 100 s.
The function modules thus perform the function of the timing relay.
In the tables, circuit breakers are used for starter combinations (without overload releases).
However, 3RV20 motor starter protectors for motor protection with the same rated current
can also be used instead. In this case, the rated motor current of the motor starter protector
must be set to the maximum value. This prevents a simultaneous tripping of the motor starter
protector and overload relay.

 Loading...
Loading...