3 Ranging API functional description
This section gives a functional description of the ranging operations and describes the call flow to be followed to
perform a ranging measurement using the VL53L1X sensor.
3.1 Distance ranging description
The sensor ranges continuously and autonomously with a programmable inter-measurement period.
Autonomously means that ranging is made without involvement from the host. This allows the host to be in a Low-
power state (energy saving). The host is only woken up upon measurement interrupts when ranging data are
available. There is no need to issue a new start command to enable new ranging, however a clear interrupt is
required after getting ranging data to enable the next interrupt event. Otherwise, the device ranges continuously
and no interrupt event occurs to notify the user of the availability of new ranging data once the sensor finishes the
ranging sequence.
Note: In this user manual, the term interrupt may designate a physical interrupt on the GPIO1 pin or a “software”
interrupt which is a value change in the GPIO__TIO_HV_STATUS register.
3.2 Distance threshold detection description
In addition to the regular ranging capability, the sensor can be programmed to detect an object under certain
predefined criteria by using the function VL53LX_SetDistanceThreshold (). The available detection condition use-
cases include:
• Object under a certain distance
• Objet beyond a certain distance
• Object within a window limited by a near and far threshold
• Object out of a window limited by a near and far threshold
3.3 Timing considerations
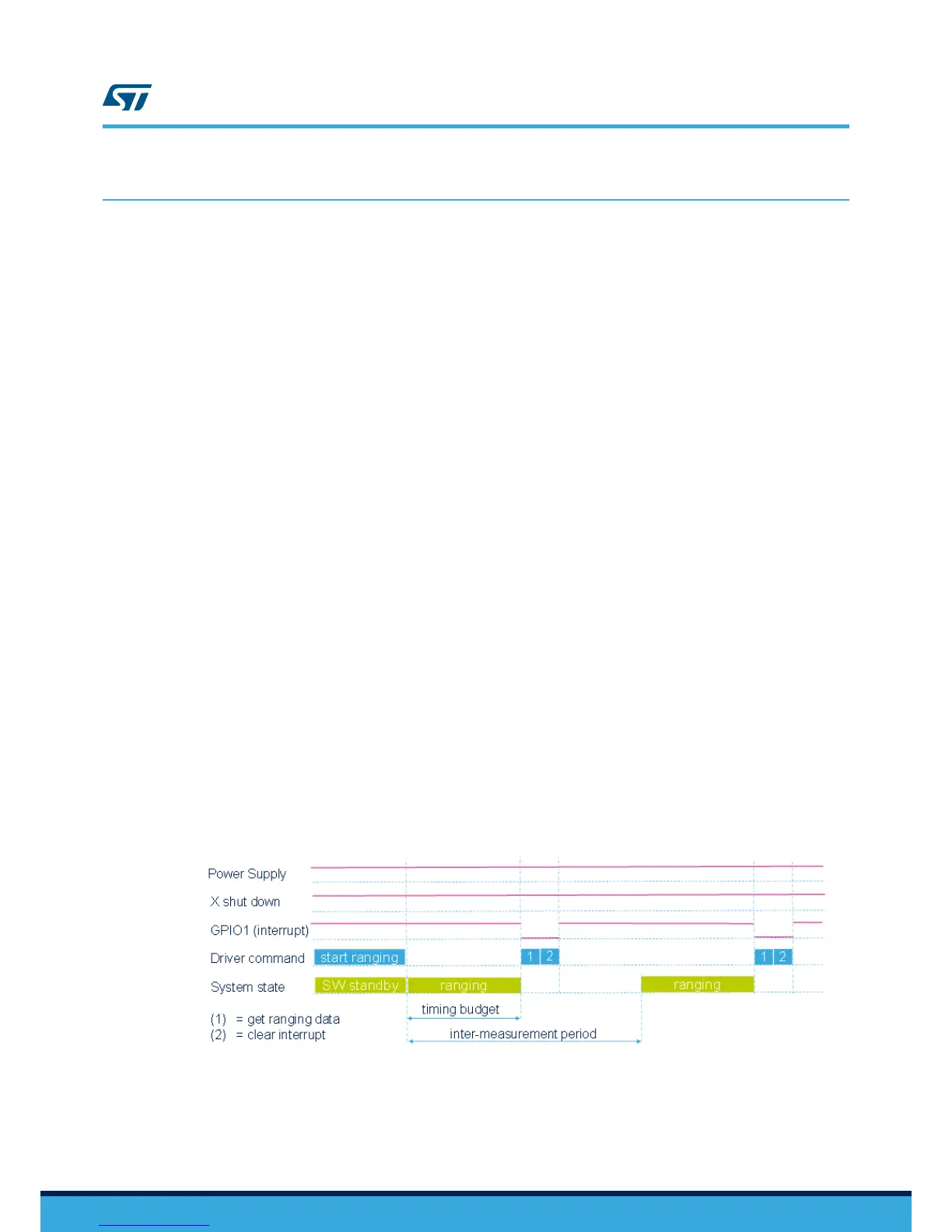
The timing budget (TB) is the time required for the device to make one distance measurement. Increasing the TB
improves the measurement reliability but also increases power consumption. So, there is a trade-off between
measurement accuracy and power consumption. In the VL53L1X_ULD driver, the TB values available are [15, 20,
33, 50, 100, 200, 500 ms].
The inter-measurement period (IMP) is the time between two consecutive measurements. The IMP must be
greater than or equal to the TB otherwise the actual IMP is double the expected value. Note that there is no
automatic check in the VL53L1X_ULD driver, so the user has to verify this condition when setting the IMP.
Figure 3. Ranging sequence and timings
UM2510
Ranging API functional description
UM2510 - Rev 1
page 4/26