You can set up response while the real-time auto-gain tuning is valid.
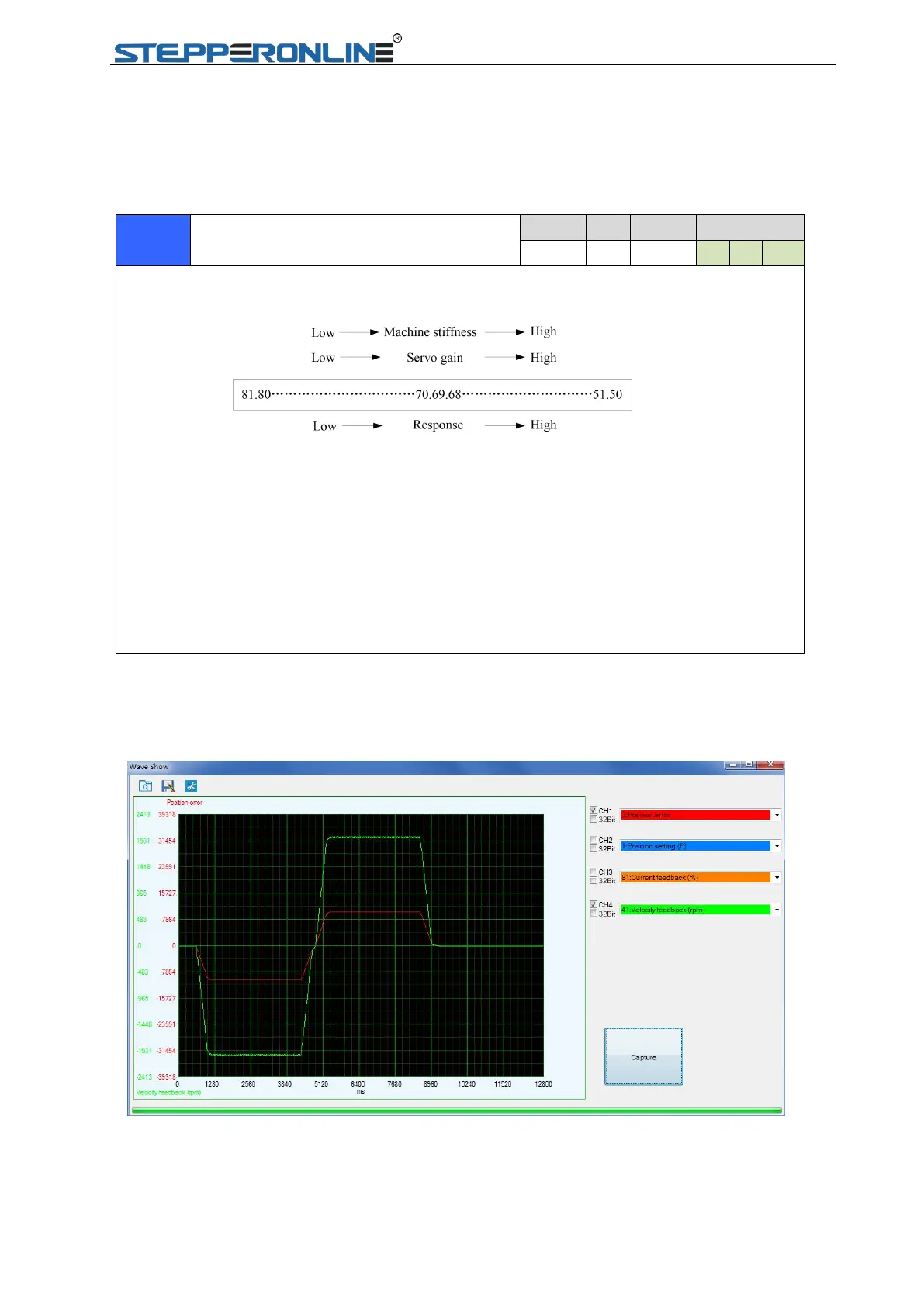
Notice: Lower the setup value, higher the velocity response and servo stiffness will be
obtained. However, when decreasing the value, check the resulting operation to avoid
oscillation or vibration.
Control gain is updated while the motor is stopped. If the motor can’t be stopped due to
excessively low gain or continuous application of one-way direction command ,any change
made to Pr0.03 is not used for update. If the changed stiffness setting is made valid after the
motor stopped, abnormal sound or oscillation will be generated. To prevent this problem, stop
the motor after changing the stiffness setting and check that the changed setting is enabled.