Quick Start of T6 AC Servo
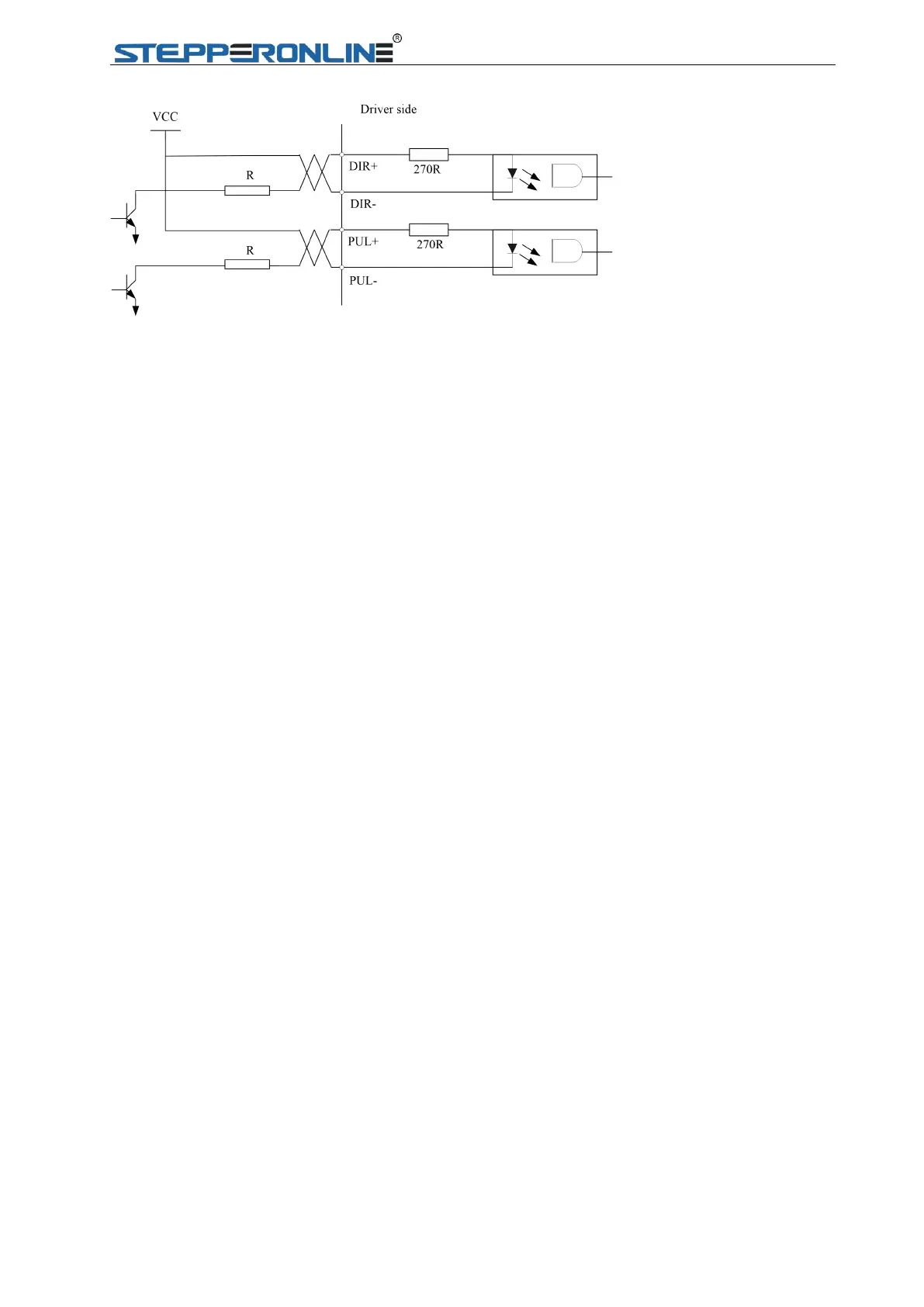
Wiring method of 24V single-ended signal (Pin 4/6/16/17)
A. The drive support two wiring methods: 5V differential signal and 24V single-ended signal.
B. 5V differential signal are recommended to get more accurate pulse signal data.
C. While 24V single-ended signal are adopted, the power supply is provided by user, if the power
polarity connects reversely, the drive will be damaged.
D. Pulse input signal format show as below chart, in addition, 4 times pulse frequency ≤ 500kH while
adopting 2 phase input.
2.1.2 Connect to tune software. (Perform this step if it is necessary to install
driver)
Refer to section 1.1.2 of chapter 1.
2.2 Main steps to tune T6 Drives in position mode
(1) Connect the wire correctly (motor will be recognized by drive automatically );
(2) Use “run testing” to test the motor if motor run normally or not.
(3) Set the value of Pr400 (Pr400=83 for external servo on signal ; Pr400=3 for internal signal )
(4) Choose right control mode Pr0.01. (0: position mode, 1: velocity mode, 2: torque mode).
(5) Connect the motor with load and Tuning the inertia ratio(Pr0.04)
(6) Connect the motor with load and Tuning stiffness for each axis (Pr0.02, Pr0.03).
(7) Tune Pr2.22 and Pr2.23 for smoother moving if needed.
(8) Set the value of Pr006, 007,008,009,010.
(9) Tune Pr0.00 for more stiffness if needed.