Quick Start of T6 AC Servo
The noise of motor occurs and alarm occurs if the position loop gain becomes bigger, so just make
sure there is no noise.
Finally, set Pr0.03=62, the basic setting for position loop is finished in Position mode.
Simple debugging for position control
•
Debugging steps
(1) Confirm pulse polarity Pr0.06, command input mode Pr0.07
(2) Modify Pr0.08 and set a suitable electronic gear ratio, if intend to set non-integral electronic gear
ratio, can use Pr0.09 and Pr0.10.
(3) Set suitable inertia with Pr0.04; suggest increase/decrease the value In multiples of 100.
(4) Adjust Pr0.03 to be a suitable stiffiness value. Suggest to set it from big to small until sharp noise
appear
(5) Each time you modify parameters, pls execute save steps and restart the power.
• Basic parameter debugging
Remark:
1. Default for Pr0.08 pulse per rev is 10000.
2. Electronic gear ratio can be also set by Pr0.09(numerator) and Pr0.10(denominator), Pr0.08
must be set as 0 before that.
3. Input pulse frequency which is higher than 500K can not be identified by driver. Assuming that
10000 ppr, that means corresponding command bandwidth of 3000rpm can reach to 500k. If
motor run above 3000 rpm, the pulse per rev must be lower than 10000.
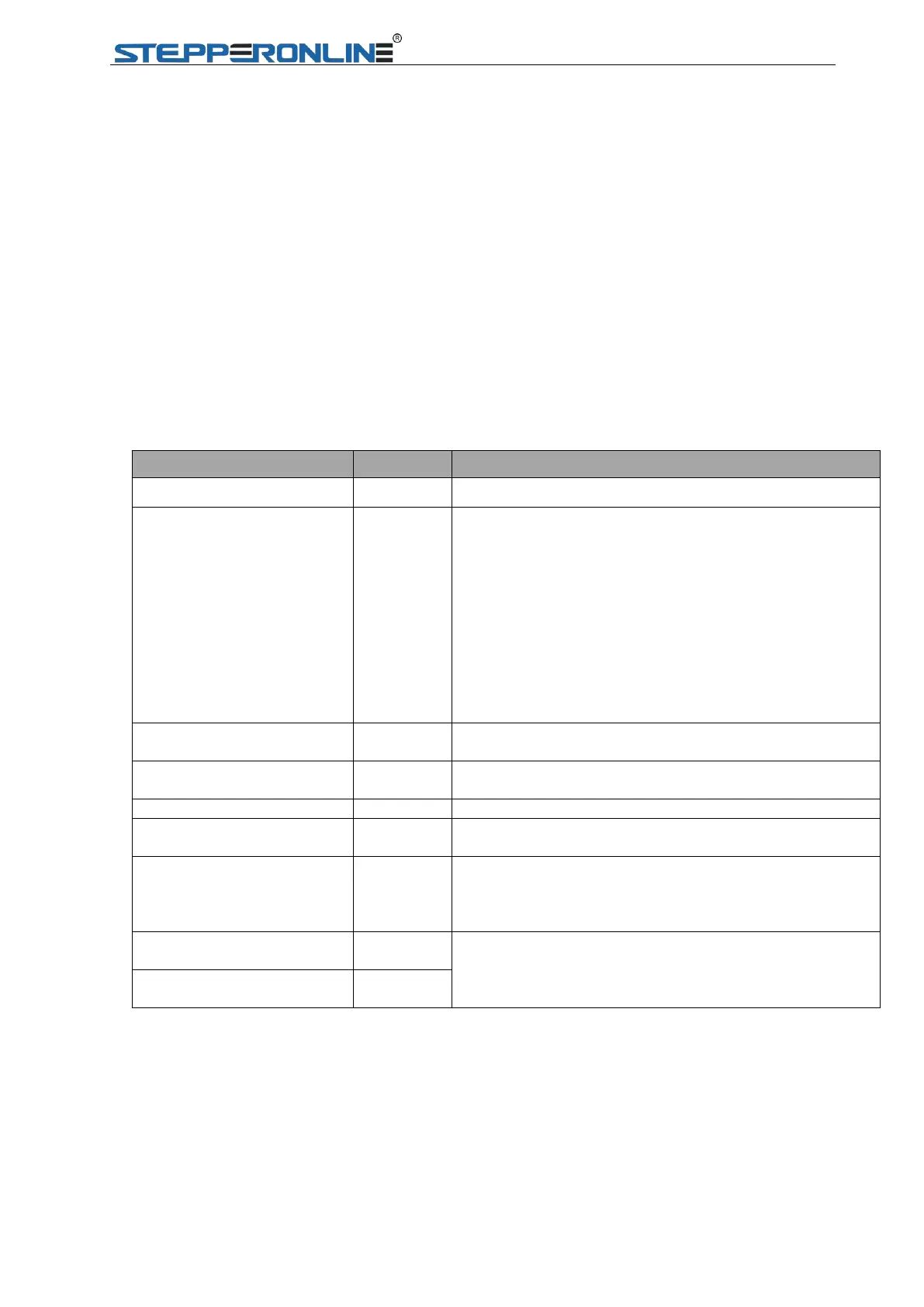
Pr0.01=0 for Position Mode
Pr0.02
(Real-time auto configuration)
Pr0.02=0 for
Manual mode, Real-time auto-gain tuning
function is disabled.
Pr0.02=
1 for Standard mode, it is usually for interpolation
movement. It is unavailable to modify the value of Pr1.00-
1.14, just change the value of Pr0.03, then all values of
Pr1.00-1.14 will be changed at the same time.
Pr0.02=2 for Positioning mode, it is usually for point to
point movement. It is unavailable to modify the value of
Pr1.00- 1.14, just change the value of Pr0.03, then all
values of Pr1.00-1.14 will be changed at the same time .
Default value is 70,
lower the setup value, higher the
velocity response and servo stiffness will be obtained.
Default value is 250, Pr0.04=( load inertia/rotate
inertia)×100%
Pr0.06(Pulse polarity setting)
Set Pr0.06 to change the rotation direction.
Pr0.07(Pulse input model)
Command Pulse Input Mode, set Pr0.07 according to
controller signal
Pr0.08(command pulse per
motor rotation)
1) If Pr008≠0 , the motor actual turns = pulse number /
Pr008
2) If Pr008=0 , Pr0.09 1st numerator of electronic gear and
Pr0.10 Denominator of electronic gear become valid.
Pr0.09(numerator of
electronic gear)
If Pr008=0 , Pr0.09 1st numerator of electronic gear and
Pr0.10 Denominator of electronic gear become valid.
Pr0.10(denominator of
electronic gear)
 Loading...
Loading...