Quick Start of T6 AC Servo
Position command filter
To make the positional command divided or multiplied by the electronic gear smooth, set the
command filter.
Tuning the dynamic tracking performance (Pr0.00) (optional)
Notes: set Pr0.02=2 if application is point to point movement, no need to tune the dynamic tracking
performance. set Pr0.02=1 if application is interpolation movement, it is very useful to tune the
dynamic tracking performance. MFC function is very useful for better dynamic tracking control and
contouring cutting.
Model Following Control (MFC)
As a new control technology, MFC is used to enhance the performance of dynamic tracking for input
command, make positioning faster, cut down the tracking error, run more smooth and steady .
There are two different way to use it, one is set Pr0.00 =1, the other is set Pr0.00 as another integer
which is more than 10 .
It is very useful for multi-axis synchronous movement and interpolation, the performance will be better
if the value of each axis is the same.
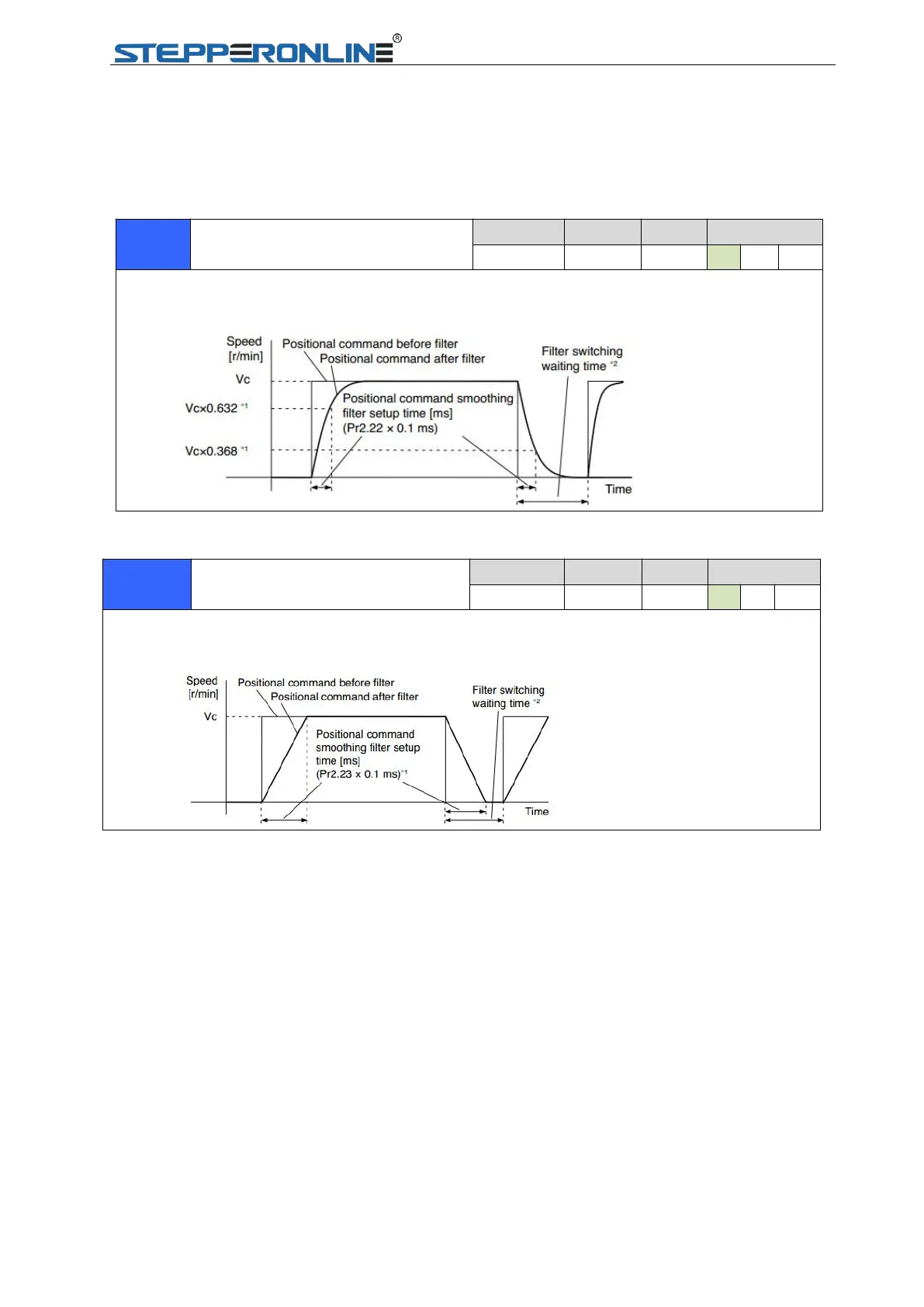
positional command smoothing filter
Set up the time constant of the1st delay filter in response to the positional command.
When a square wave command for the target speed Vc is applied ,set up the time constant of
the 1
st
delay filter as shown in the figure below.
positional command FIR filter
Set up the time constant of the1st delay filter in response to the positional command.
When a square wave command for the target speed Vc is applied, set up the Vc arrival time as
shown in the figure below.