33
Stability problems
The speed control has a “PID controller”. It ensures an exact and fast adjustment of the ac-
tual value to the set point. In applications such as solar power systems or feed pumps,
the following parameters should be left in factory settings. With a few exceptions, the
system will run stably. These two values have to be balanced, however, especially for hy-
gienic hot water from the external heat exchanger. In addition, in this case the use of an
ultrafast sensor (non-standard accessory) is recommended at the hot water outlet.
Set value = desired value Actual value = temperature measured
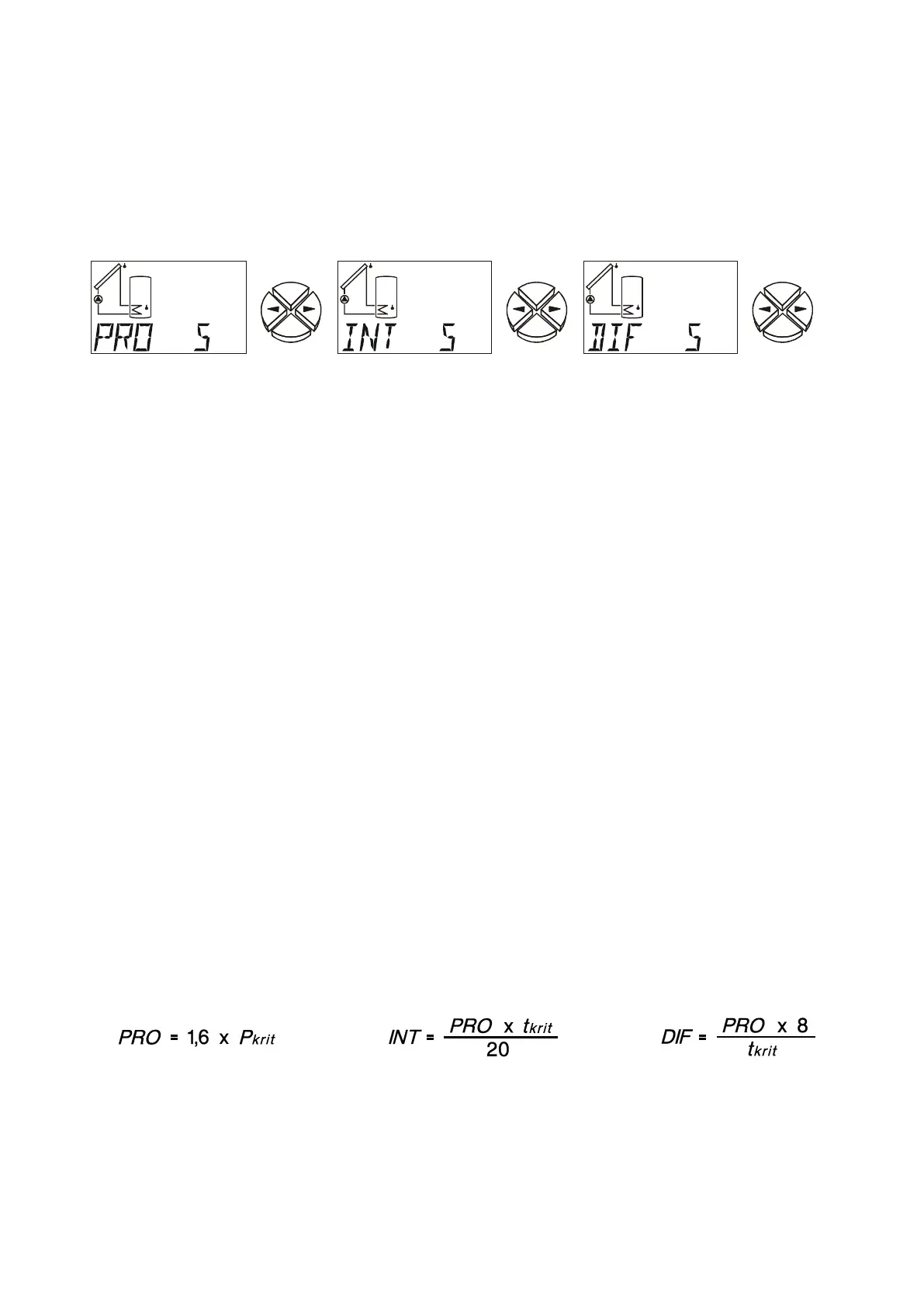
PRO 5 Proportional part of the PID controller 5. It represents the reinforcement of the
deviation between the desired and the actual value. The speed is changed by one
increment for each 0.5K of deviation from the desired value. A large number leads
to a more stable system but also to more deviation from the predefined tempera-
ture. (ex works = 5) Setting range: 0 to 9
INT 5 Integral part of the PID controller 5. It periodically adjusts the speed relative to the
deviation remaining from the proportional part. For each 1K of deviation from the
desired value, the speed changes one increment every 5 seconds. A large num-
ber provides a more stable system, but it then takes longer to reach the desired
value. (ex works = 0) Setting range: 0 to 9
DIF 5 Differential part of the PID controller 5. The faster a deviation occurs between the
desired and the current value, the greater the short-term overreaction will be to
provide the fastest compensation possible. If the desired value deviates at a rate
of 0.5K per second, the speed is changed by one increment. Large numbers pro-
vide a more stable system, but it then takes longer to reach the desired value. (ex
works = 0) Setting range: 0 to 9
The parameters PRO, INT, and DIF can also be determined in a test: Assume that the
pump is running in automatic mode in a unit that is ready for operation with appropriate tem-
peratures. With INT and DIF set to zero (= switched off), PRO is reduced every 30 seconds
starting at 9 until the system is instable. In other words, the pump speed changes rhythmical-
ly and can be read in the menu with the command ACT. Every proportional part that be-
comes instable is noted as P
krit
just as the duration of the oscillation (= time between the two
highest speeds) is noted as t
krit
. The following formulas can be used to determine the correct
parameters.
A typical result of hygienic service water with the ultrafast sensor is PRO = 8, INT = 9, DIF
= 3. For reasons not entirely understood, the setting PRO = 3, INT = 1, DIF = 4 has proven
practical. Probably, the control unit is so unstable that it oscillates very quickly and appears to
be balanced due to the system’s and the fluid’s inertia.

 Loading...
Loading...
