6-19
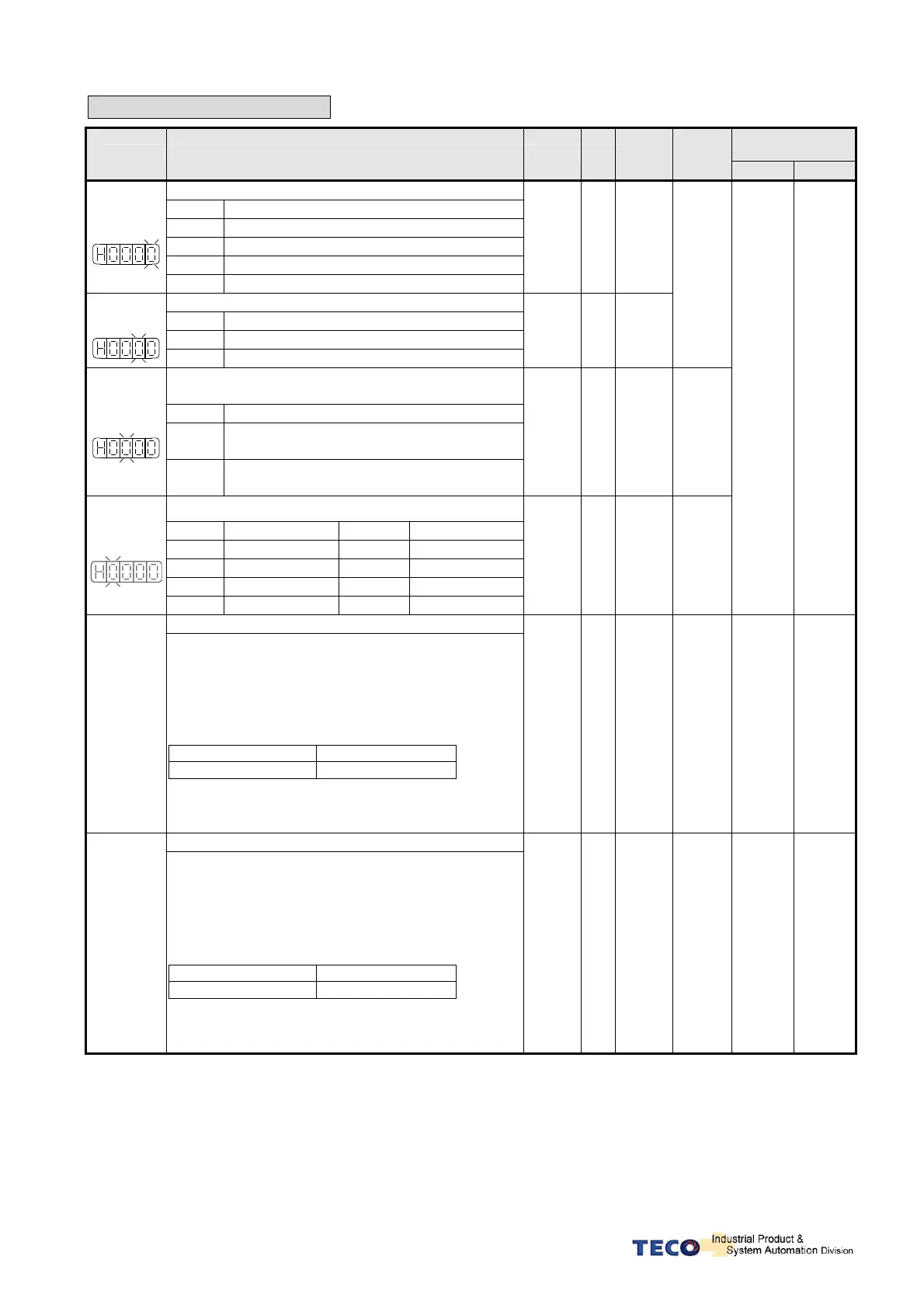
Position Control Parameter
Communication
Address
Parameter Name & Function Default Unit
Setting
Range
Control
Mode
RS232 RS485
Position pulse command selection
Setting Explanation
0 (Pulse)+(Sign)
1 (CCW)/(CW) Pulse
2 AB-Phase pulse x 2
★
Pn301.0
3 AB-Phase pulse x 4
0 X
0
│
3
Position- Pulse Command Logic
Setting Explanation
0 Positive Logic
★
Pn301.1
1 Negative Logic
0 X
0
│
1
Pe
Selection for command receive of drive inhibit
mode
Setting Explanation
0
When drive inhibit occurs, record value of
position command input coherently.
★
Pn301.2
1
When drive inhibit occurs, ignore the value
of position command.
0 X
0
│
1
Pi
Pe
Pulse command filter band width selection
Setting Explanation Setting Explanation
0 4500KHz 4 370KHz
1 2500KHz 5 180KHz
2 1200KHz 6 90KHz
★
Pn301.3
3 750KHz 7 40KHz
1 X
0
│
7
Pe
550H 0301H
Electronic Gear Ratio Numerator 1
Pn302
Use input contacts GN1 & GN2 to select one of four
electronic Gear Ratio Numerators.
To select Numerator 1, the statue of the
input-contacts
GN1 & GN2 should be as follows:
Input Contact GN2 Input Contact GN1
0 0
Note: Input contacts status “1” (ON) and “0”
(OFF).
Refer to 5-6-1 to set high or low input logic levels.
1 X
1
│
50000
Pi
Pe
560H 0302H
Electronic Gear Ratio Numerator 2
Pn303
Use input contacts GN1 & GN2 to select one of four
electronic Gear Ratio Numerators.
To select Numerator 2, the statue of the
input-contacts
GN1 & GN2 should be as follows:
Input Contact GN2 Input Contact GN1
0 1
Note: Input contacts status “1” (ON) and “0”
(OFF).
Refer to 5-6-1 to set high or low input logic levels.
1 X
1
│
50000
Pi
Pe
561H 0303H