5-22
PI/P-Mode Switching Condition
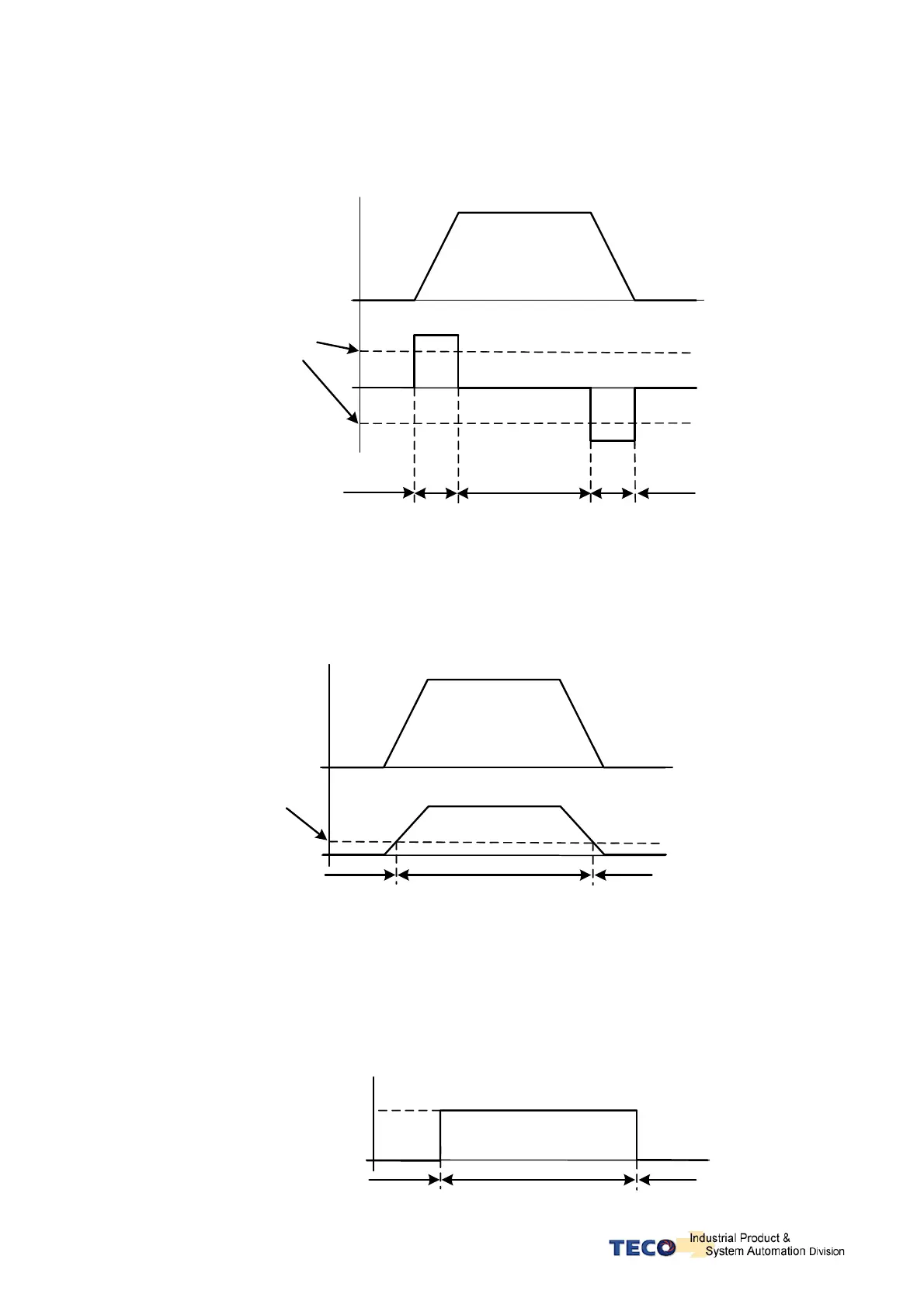
(Acceleration)
Speed
PI Control
Acceleration Command
P Control PI Control PI ControlP Control
Cn018
Cn019
Speed
Position Error Value
PI Control P Control PI Control
PI/P-Mode Switching Condition
(Position Error)
(3) PI to P mode switch over by comparing Acceleration command.
When the Acceleration command is less than Cn018 PI control is selected.
When the Acceleration command is greater than Cn018 P control is selected.
As shown in diagram below:
(4) PI to P mode switch over by comparing Position Error value.
When the Position Error value is less than Cn019 PI control is selected.
When the Position Error value is greater than Cn019 P control is selected.
As shown in diagram below:
(5) PI to P mode switch over by PCNT input contact.
When the PCNT input contact is open PI control is selected.
When the PCNT input contact is closed P control is selected.
Note: Input contacts status “1” (ON) and “0” (OFF).
Please check 5-6-1 to set the required high /Low signal levels (PNP/NPN) selection.
Switch PI/P
by PCNT input contact
P control
PI control
Enable
Status of contact PCNT
1
0
PI control
 Loading...
Loading...

