5-35
Position
pulse
P8
-10
10
20
30
1
1
0
0
0
1
1
0
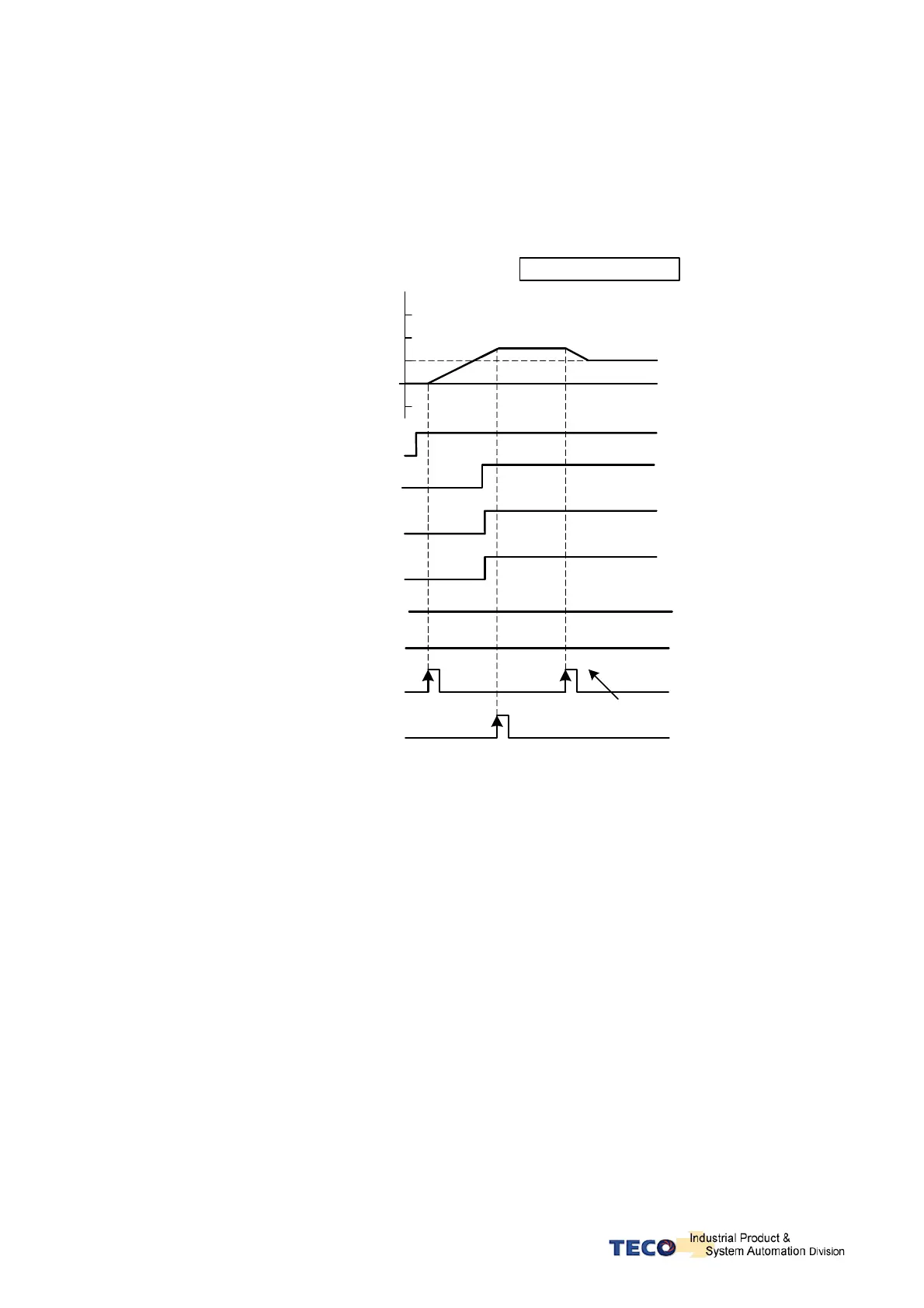
P1=30pulses, P8=10pulses
Pn315(Pulse Error Value ClearMode)=2
bsolute moves
1
01
P1 P8
Input Contact SON
Input Contact POS1
Input Contact POS2
Input Contact POS3
Input Contact POS4
Input Contact PTRG
Input Contact CLR
Attention! Motor Re-accept
Command P8
00
Input Contact POS5
CLR (Clear position command).
If the CLR input is activated when a position command is in process then the motor will stop immediately
and the remaining positioning pulses will be cleared. Parameter Pn315 must be set to 1or 2 as required
(refer to section 5-4-7).
Once the PTRG input contact is activated again then a new position command will be started according to
the selection of input contacts POS1~POS5.
Note: Input contacts status “1” (ON) and “0” (OFF)
Please check section 5-6-1 to set the required high /Low signal levels (PNP/NPN) selection.
 Loading...
Loading...

