4-7
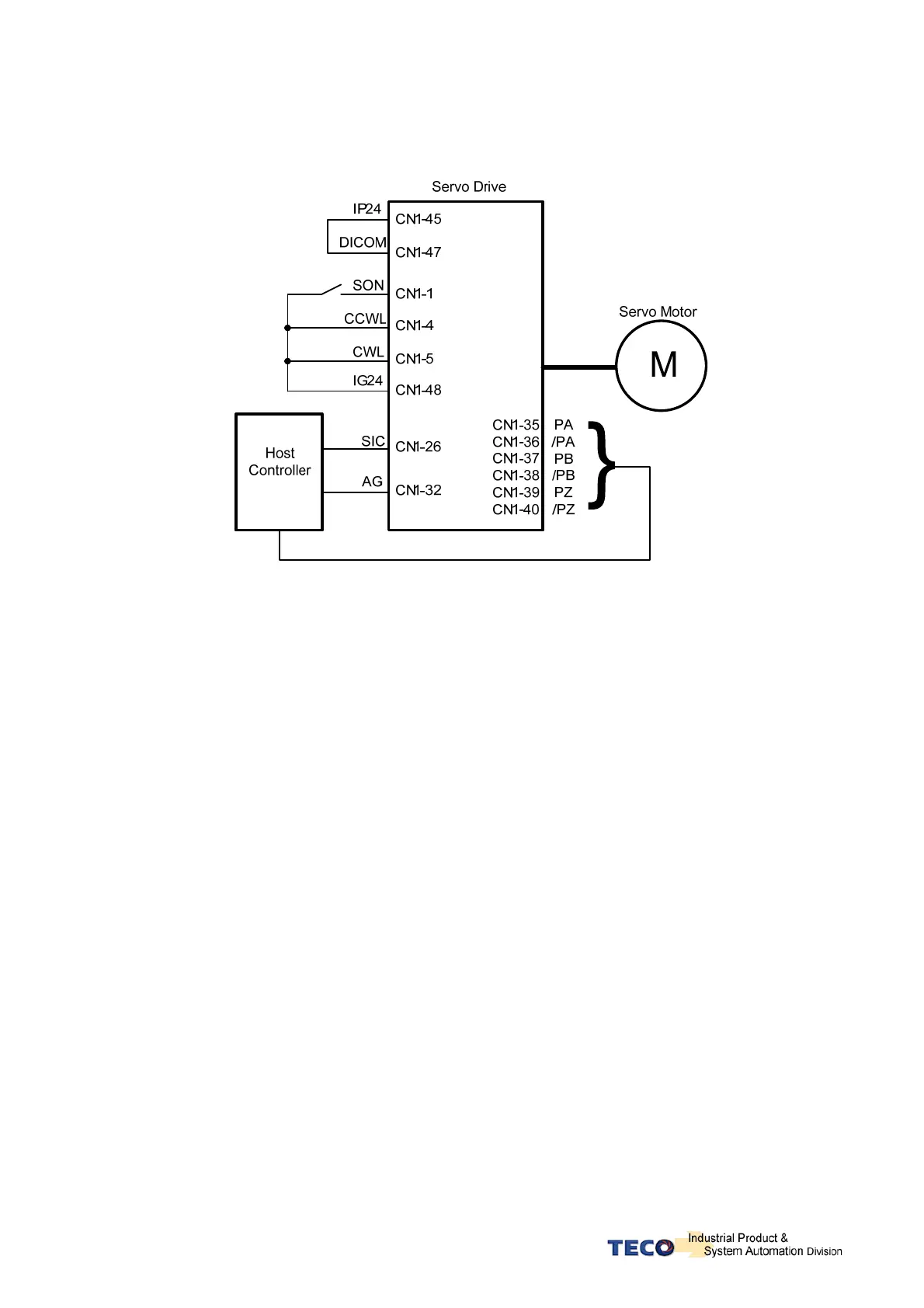
4. Connection with a host controller.
Check and ensure that the wiring for the servo drive and host controller, speed analog signal input (SIN), and
encoder output (PA, /PA, PB, /PB, PZ, /PZ) are all correct and according to the diagram below:
5. Confirm the rotation number and encoder output of Servo Motor.
Use parameter Un-14 to check if the Motor feed back (number of revolutions) per minute is correct and the
same as number of revolutions sent by the host controller.
If there is any difference then check and make sure that parameter Cn005 ( Encoder ppr) is set correctly.
Once this is complete remove SON signal to switch off power to the motor.