49
Address
Parameter
Name & Function Default
Unit
Setting
Range
Control
Mode
RS232
RS485
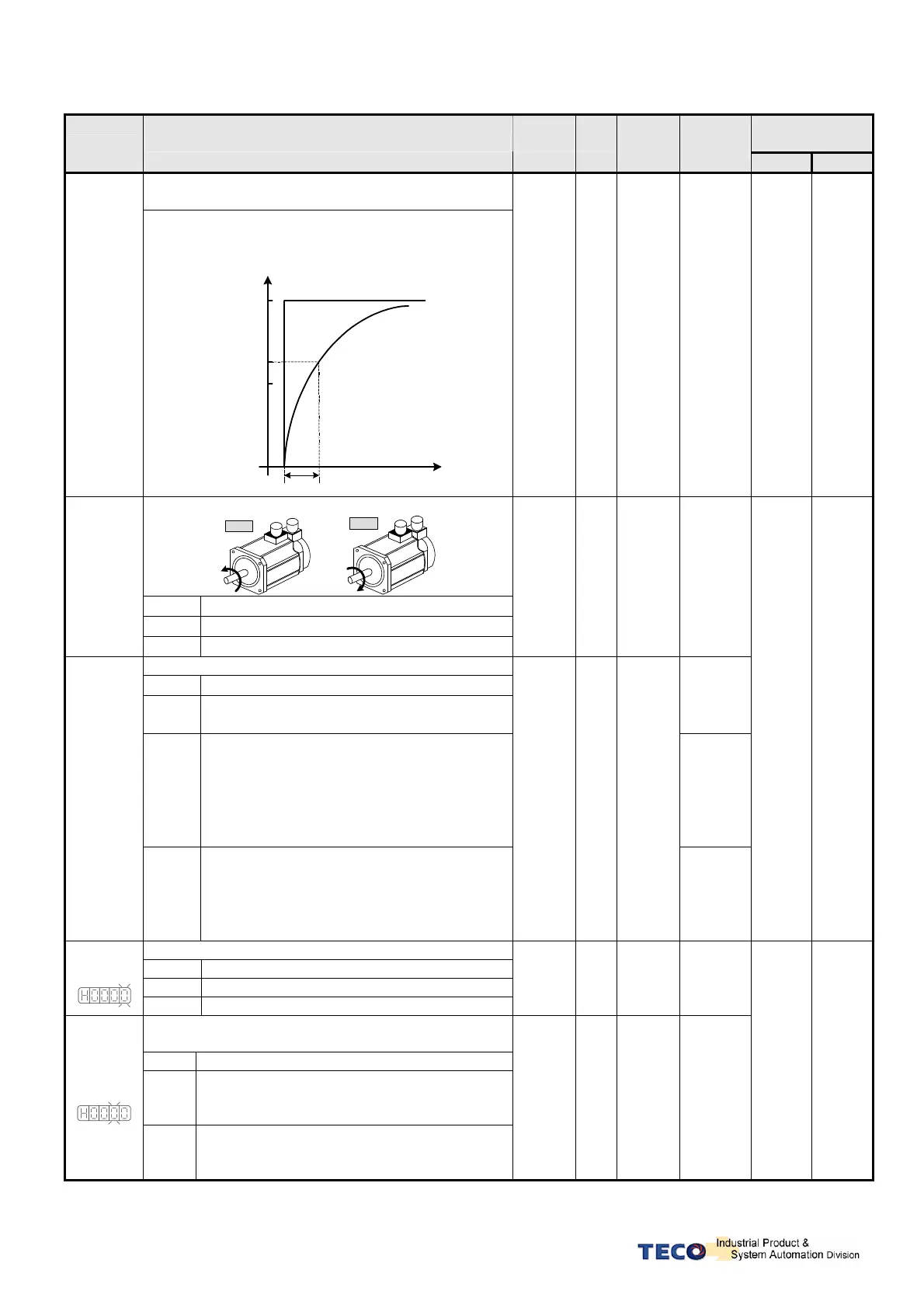
Position command smooth
Acceleration/Deceleration Time Constant
★
Pn313
Set the time period for the Position command pulse
frequency to rise from 0 to 63.2%.
Time (ms)
Pn313
100
50
63.2
Position Pulse Command Frequency (%)
Position Pulse Command Frequency
0 msec
0
│
10000
Pe 55CH
030DH
Positioning Command Direction Definition
CCW
CW
Setting
Explanation
0 (CW) .Clockwise
★
Pn314
1 (CCW). Counter Clockwise
1 X
0
│
1
Pi
Pe
55DH
030EH
Pulse Error Clear Modes.
Setting
Explanation
0
Once CLR signal is activated, it eliminates,
the Pulse error amount.
Pe
1
Once CLR signal is activated, following takes
place:
• The position command is cancelled.
• Motor rotation is interrupted
• Pulse error amount is cleared.
• Machine home reference is reset
Pi
Pe
Pn315
2
Once CLR signal is activated, following takes
place:-
• The position command is cancelled.
• Motor rotation is interrupted
Pulse error amount is cleared.
0 X
0
│
2
Pi
51FH
030FH
Internal Position Command Mode
Setting
Explanation
0 Absolute Position
★
Pn316.0
1 Incremental Position
0 X
0
│
1
Pi
Internal Position Command Hold (PHOLD)
program select
Setting
Explanation
0
When PHOLD is active then received PTRG
signal. Servomotor will be proceeded
position command from PHOLD position.
★
Pn316.1
1
When PHOLD is active then received PTRG
signal. Servomotor will operate intern
position command of current selection.
0 X
0
│
1
Pi
50DH
0310H
 Loading...
Loading...

