32
Communication
Address
Parameter
Name & Function Default
Unit
Setting
Range
Mode
RS232
RS485
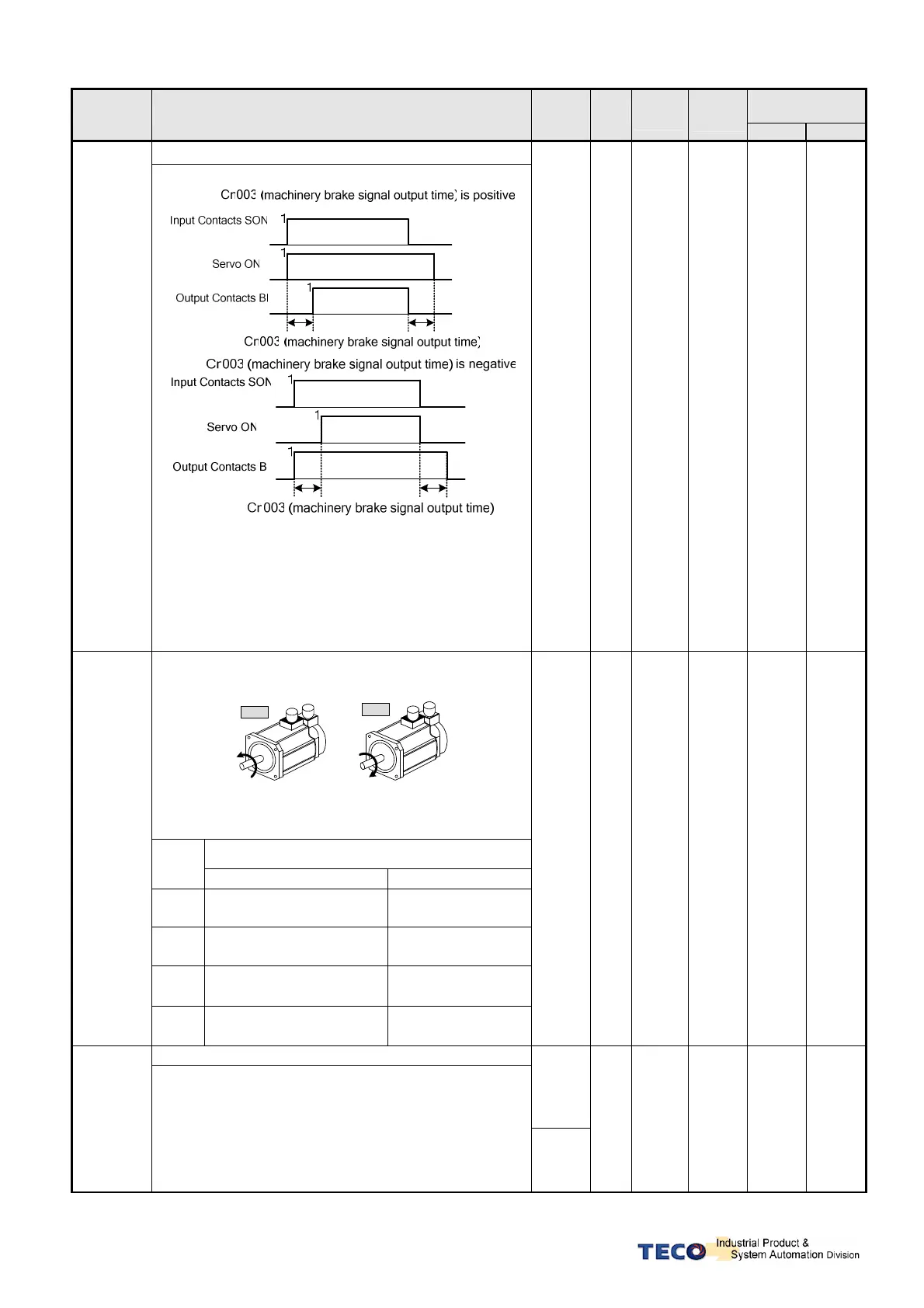
Output time setting for Mechanical Brake Signal
Cn003
Brake Signal Timing Sequence:
Implementation a pin for dynamic brake signal
output signal before to perform this function. Refer to
sequence diagram above.
Note: Signal logic level status: 1 = ON. 0 = OFF.
5-6-
1 for setting contact the high & Low
0 msec
-2000
│
2000
ALL 511H
0003H
Motor rotate direction
side)
CCW
CW
W
hen Torque or Speed Command value is Positive, the
setting of Motor rotation direction are:
Explanation
Setting
Torque Control Speed Control
0
Counter
Clock Wise(CCW)
Counter
Clock Wise (CCW)
1 Clock Wise (CW)
Counter
Clock Wise (CCW)
2
Counter
Clock Wise (CCW)
Clock Wise(CW)
Cn004
3 Clock Wise (CW) Clock Wise (CW)
0 X
0
│
3
S
T
512H
0004H
Encoder pulse output scale.
2500
★
Cn005
For default set to the rated encoder number of pulses
per revolution, such as 2500ppr.
Encoder ppr can be scaled by setting a pp
of 1 to the rated ppr of the encoder for scaling purpose.
PPR = Pulse per revolution.
Ex:
encoder rated precision is 2000 ppr, If you
setting Cn005 =1000, the output is 1000ppr.
8192
pulse
1
│
pulse
per
rotation
ALL 513H
0005H
 Loading...
Loading...

