Stellaris® Stepper Motor RDK User’s Manual
November 4, 2009 11
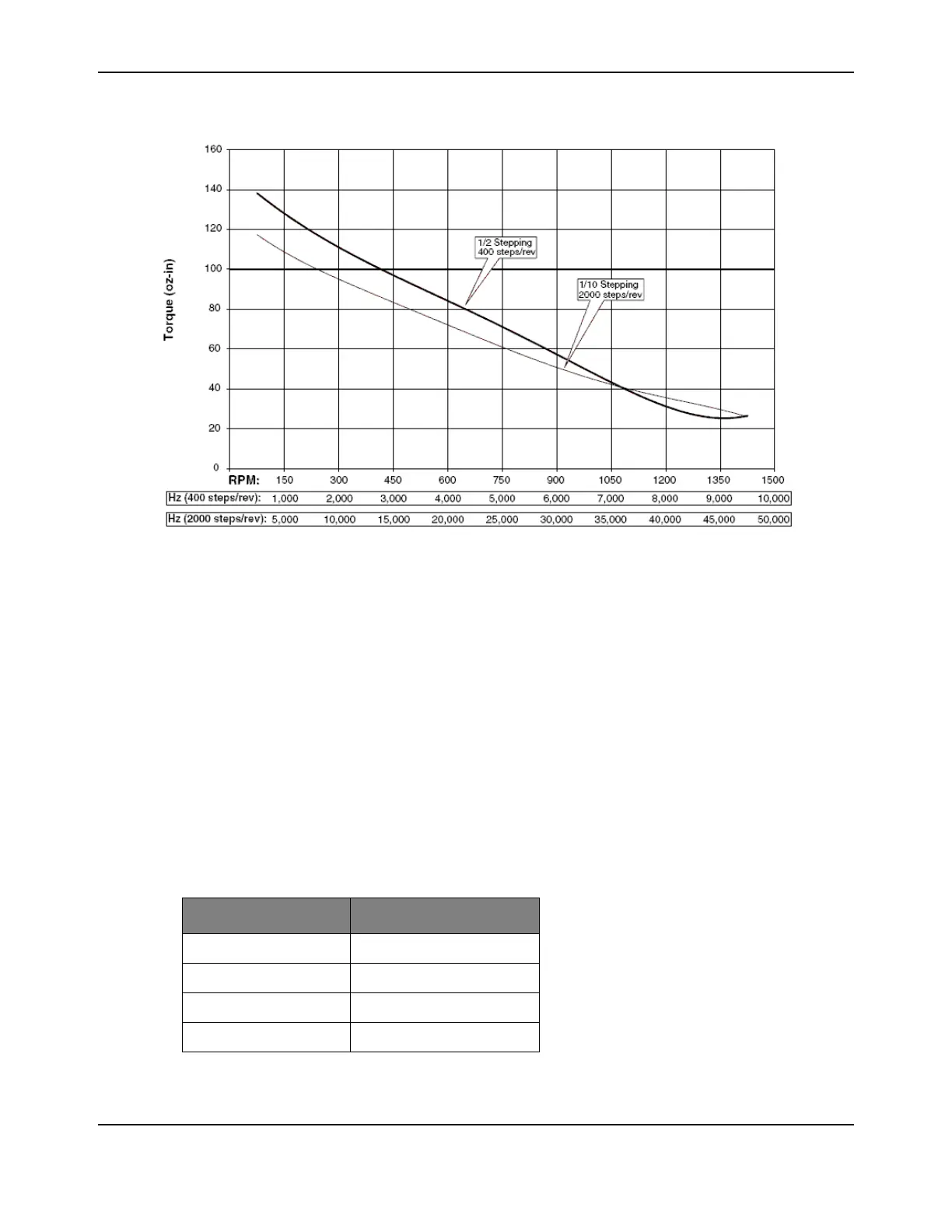
Figure 1-2. Stepper Speed-Torque Curve
The Stepper RDK operates bipolar stepper motors with two coils—probably the most common
class of stepper motor. Bipolar refers to the fact that the stepping sequence requires coil current to
flow in alternating directions. By comparison, unipolar motors require current in only one direction
and are simpler to drive, but have much lower torque for the same frame size.
Stepper motors are designed for accurate open-loop positioning, and not for high efficiency. As a
result, stepper motors operate at high temperatures. Current to the motor should be adjusted so
that the motor case temperature never exceeds 100°C.
Chopper Control
A stepper motor can be operated at its rated DC voltage, but only low step rates are possible. This
is because the current builds comparatively slowly in the stator coil.
To overcome this, chopper control uses a supply voltage much higher than the motor's rating. This
allows the coil current to increase rapidly to the desired level before the control starts modulating
or chopping the voltage to maintain that level. This allows higher step rates with more torque. A
supply of 5-20 times the motor’s DC voltage is commonly used.
Table 1-1. RDK Motor Specifications
Motor Frame Size NEMA23
Holding Torque 166 oz-in (1.29 Nm)
Rated Current 2.8 A/phase
Coil Resistance 0.75Ω
Step Angle 1.8°