1 1
SC 19
PID P I D
1 8 1 4
1 z 1 z 1000
G (z) K K K 2 KCOMP 2
1 z 1 2 z 2 (PRD 1)
- -
-
- - -
æ ö
+ -
= + + ´ ´ ´ ´
ç ÷
ç ÷
- - ´ a ´ ´ +
è ø
www.ti.com
Monitoring, Re-configuring and Re-tuning with Designer GUI
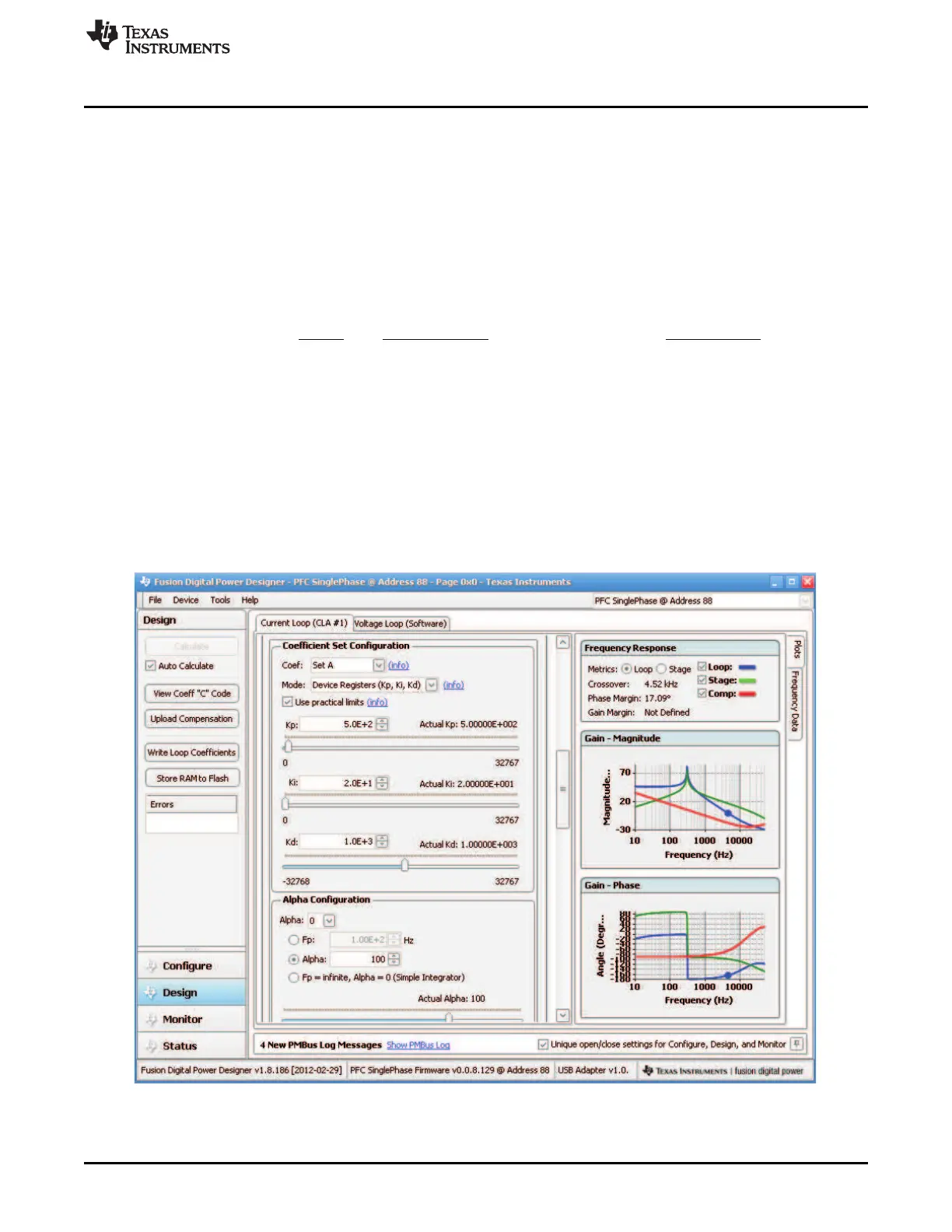
14.4.2 Current Loop Re-Tuning
The current loop PID coefficients can be re-tuned following the approaches described in section 1.4. Scroll
down the window that is shown in Figure 46, then Figure 48 is obtained.
Figure 37 shows the current loop compensation details. There are two sets of PID coefficients used in the
current control loop, Set A and Set B. In Figure 48 Set A is shown. The corresponding bode plots are
shown on the left in Figure 48.
Coefficients of Set A are used when input line voltage is between 90 V
AC
and 160 V
AC
. Coefficients of Set
B are used when input line voltage is above 160 V
AC
till the maximum input of 264 V
AC
.
The actual PID control makes re-scale of the values shown in Figure 48 when used inside the UCD3138.
(18)
PRD is a threshold value used to generate DPWM cycle ending point. The DPWM is centered on a period
counter which counts up from 0 to PRD, and then is reset and starts over again. In the single-phase PFC
design, KCOMP is set up equal to PRD.
In the current control page of the Design, PID coefficients can be re-tuned. The GUI also provides
conversion results from PID coefficients to the zeros and the pole by clicking Mode to select a
corresponding conversion. One can also change the zeros and the poles and then use the GUI to convert
to PID coefficients by clicking Mode to select back to K
P
, K
I
, and K
D
. Be aware that from the two zeros can
be complex conjugates. When a set of PID coefficients does make complex conjugate zeros, the GUI
pumps up a message to notify that Q and ωr have to be generated instead of real zeros. In this case, the
users may need to calculate the complex conjugate zeros based on Equation 6.
Figure 48. Current Loop Re-Tuning
53
SLUU885B–March 2012–Revised July 2012 Digitally Controlled Single-Phase PFC Pre-Regulator
Submit Documentation Feedback
Copyright © 2012, Texas Instruments Incorporated