Channel definitions are available here.
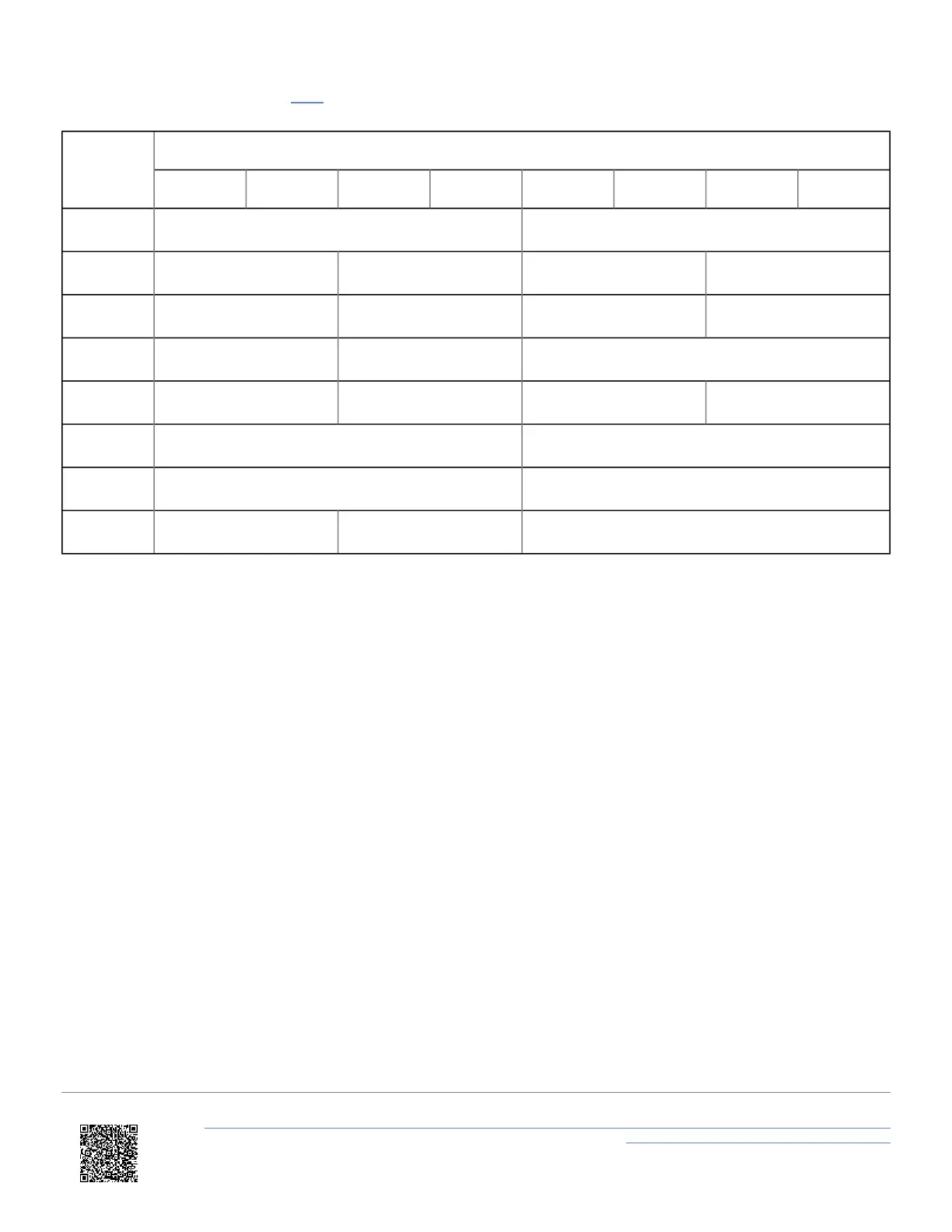
ID*
Data Bytes
1 2 3 4 5 6 7 8
0x066 (1) Velocity (km/h) Unused
0x06B (2) IMU_roll_rate (°/s) (3) IMU_pitch_rate (°/s) (4) IMU_yaw_rate (°/s) Unused
0x075 (5) Long_acc (g) (6) Lat_acc (g) (7) IMU_Z_accel (g) Unused
0x083 (8) Inverse_path_radius (9) Slip_angle Unused
0x095 (10) Roll_imu (11) Pitch_imu (12) Robot_head (13) Heading
0x09C (14) Time_since_midnight_UTC Unused
0x09F (15) Latitude (16) Longitude
0x0AF (17) X_velocity (18) Y_velocity Unused
*Default Identifiers. The identifier values can be changed using the configuration software.
1. Velocity, 32 bit signed integer.
2. Roll rate, 16 bit signed integer 0.01°/s per bit.
3. Pitch rate, 16 bit signed integer 0.01°/s per bit.
4. Yaw rate, 16 bit signed integer 0.01°/s per bit.
5. Longitudinal Acceleration, 16 bit signed integer 0.0004 g per bit.
6. Lateral Acceleration, 16 bit signed integer 0.0004 g per bit.
7. Z Acceleration, 16 bit signed integer 0.0004 g per bit.
8. Inverse Path Radius, 16 bit signed integer 0.01°/s per bit. Inverse Path Radius = 1/(Speed (m/s)/yaw rate (rad/s)).
9. Slip Angle, 16 bit signed integer 0.01° per bit.
10. Roll Angle derived from Kalman Filter (activated when IMU integration is enabled), 16 bit signed integer 0.01° per
bit.
11. Pitch Angle derived from Kalman Filter (activated when IMU integration is enabled), 16 bit signed integer 0.01° per
bit.
12. Robot heading, 16 bit unsigned integer 0.01° per bit (not delayed when ADAS enabled).
13. Heading, 16 bit unsigned integer 0.01° per bit.
14. Time since midnight. This is a count of 10 ms intervals since midnight UTC. (5383690 = 53836.90 seconds since
midnight or 14 hours, 57 minutes and 16.90 seconds).
15. Position, Latitude in degrees. This is a true 32 bit signed integer, North being positive,, 1e^-7 per bit.
https://en.racelogic.support//Product_Info/VBOX_Data_Loggers/VBOX_3i_Range/VBOX_3i_User_Guide_(All_Variants)/15_-
_VB3i_Technical_Properties/VB3i_CAN_Output
105