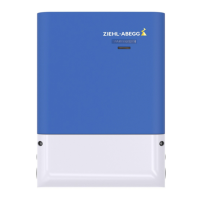
Start-up variations
RF Controller enable
V_1 Positioning speed
V_3 Travel Speed
RV1 / RV2 Direction default
RB Controller ready
MB_Brake Mechanical brake
T_1 Flux build-up time
T_2 Brake opening time
T_3 Speed=0
K_START MOD1 / MOD2 (Speed control)
MOD3 (position- & speed control)
MOD4 / MOD5 (position control)
SPD_KP Base amplification speed controller
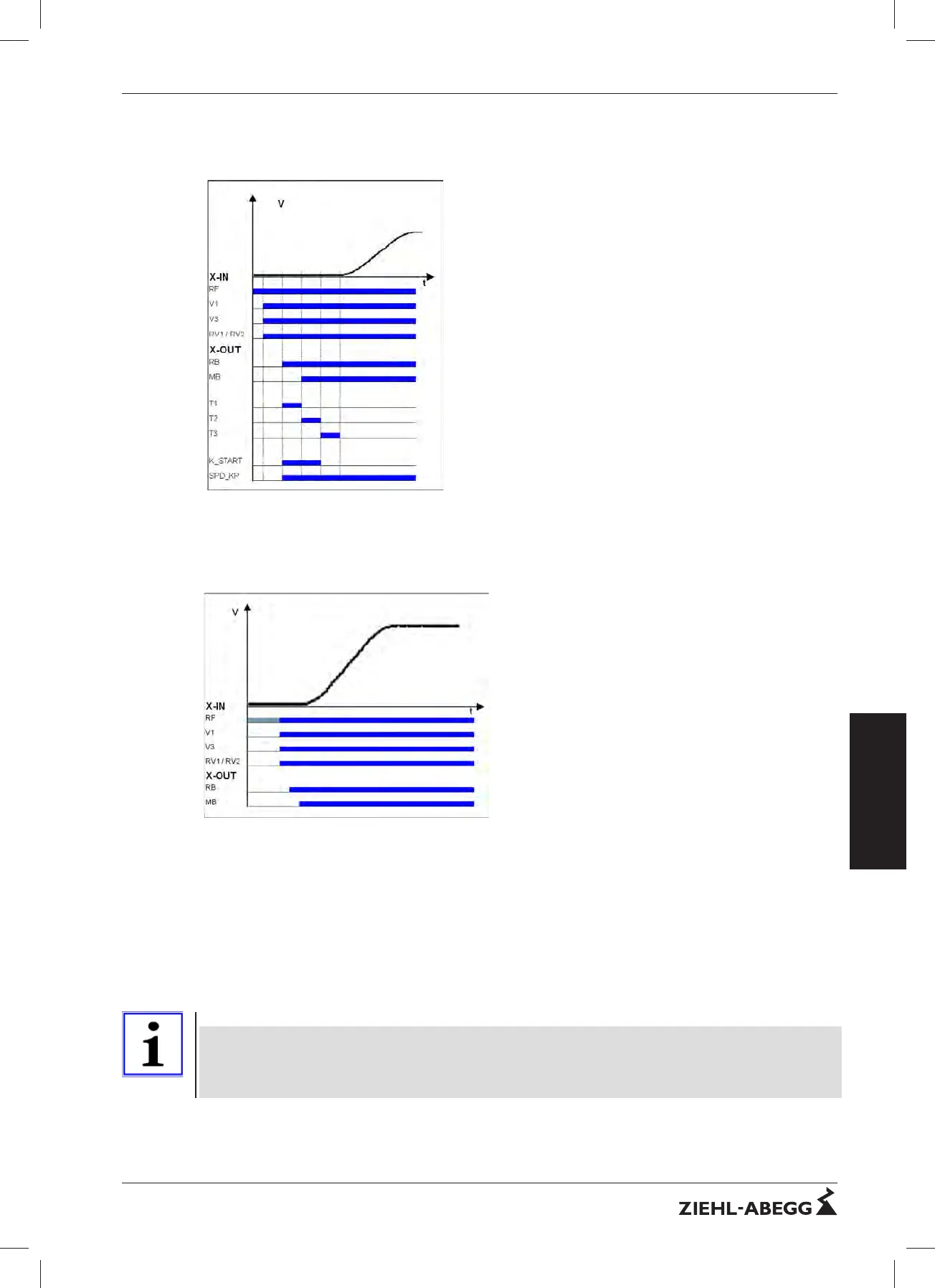
12.4 Optimizing the acceleration
The acceleration torque is defined by the parameter in the Accelerating menu. By changing the
parameter values, you can adapt the curve shape to the requirements
Acceleration ramp
RF Controller enable
V_1 Positioning speed
V_3 Travel Speed
RV1 / RV2 Direction default
RB Controller ready
MB_Brake Mechanical brake
A_POS: Acceleration preset in m/s². A higher value causes greater acceleration and thus a steeper ramp
R_POS1: Setting the lower round off A higher value causes a softer round off
R_POS2: Setting the upper round off. A higher value causes a softer round off.
Information
To achieve optimum starting behavior:
•
the motor contactorsmust be switched instantaneously with the digital output "RB" in case motor
contactors are used.
•
The brakes must be switched instantaneously with the digital output "MB"
Translation of the original operating instructions
ZETADYN 4C Travel options
R-TBA12_01-GB 1415 Part.-No. 00163371-GB
107
/204

 Loading...
Loading...