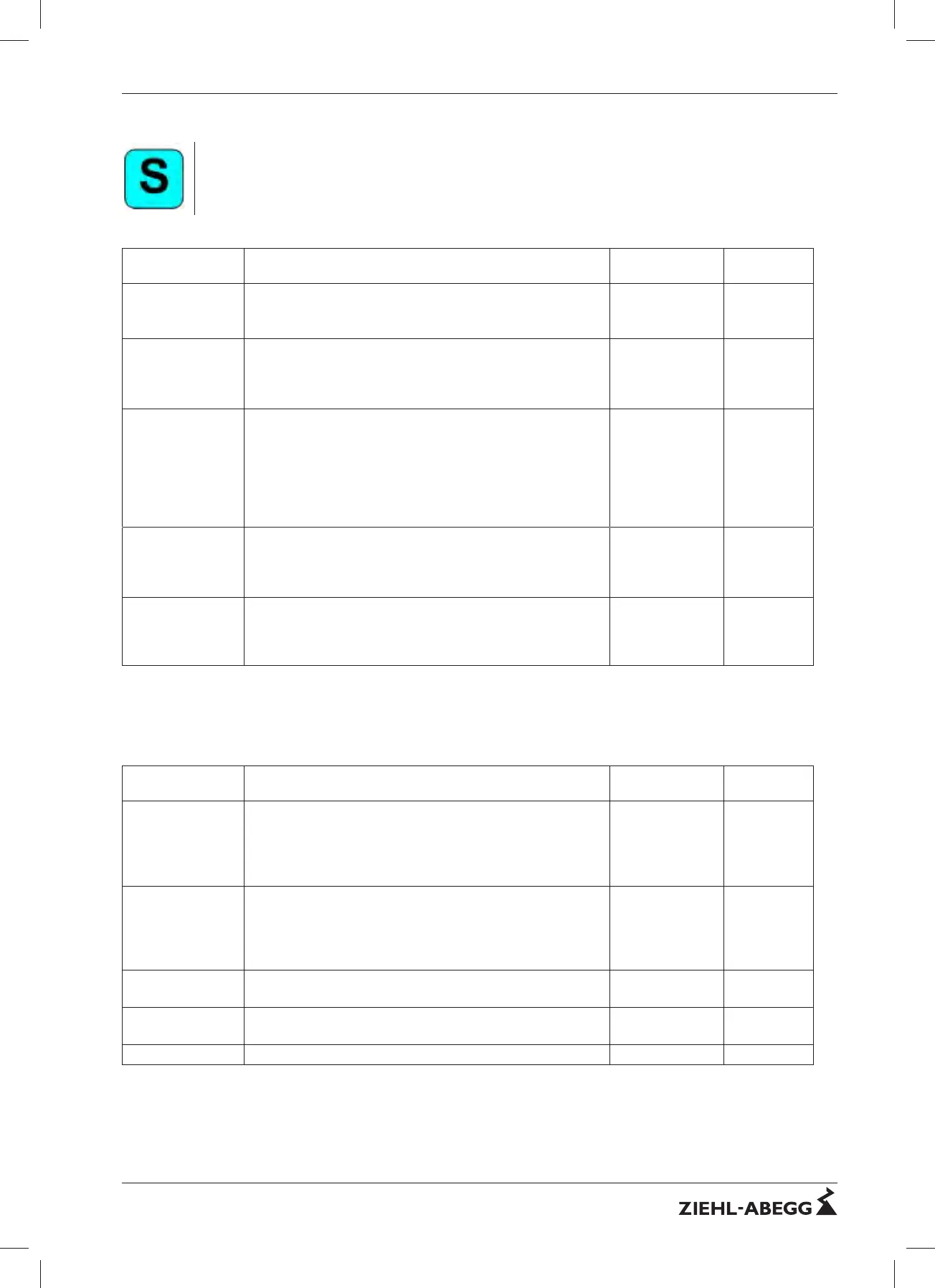
11.18 Encoder adjustment menu
Contains parameter values required for aligning the absolute value encoders for synchronous motors.
The procedure for entering the encoder alignment data is described in the "Special functions" chapter.
Parameter Description Value range
Factory set-
ting
ENC_ADJ Activating the encoder alignment
Off: no function
ON: Start or check the rotary encoder calibration
On
Off
Off
ENC_POS Encoder Position
Numerical display of the absolute position of the rotary encoder
per revolution:
0 to [4x number of pulses in rotary encoder] rpm
Cannot be set -
ENC_OFF Encoder Offset
Shifts the zero position of the absolute rotary encoder to the
pole's electrical zero position
EnDat encoder: Default 0 is absolutely necessary
SSI encoder: if the SSI encoder is not mechanically mounted in
the zero position, the value ascertained during the offset align-
ment (ENC_ADJ) for ENC_OFF must be entered
0 ... 360.00° 0
SAV_P_E Filing data in the absolute encoder with the "electronic name
plate" function
ON: Data from the ZETADYN 4 are filed in the absolute encoder
OFF: Function deactivated
On
Off
Off
LOD_P_E Reading out data from the absolute encoder with the "electronic
name plate" function
Input 27: Data are read out of the absolute encoder into the
ZETADYN 4
0...65535 0
11.19 Safety gear menu
Confi guration of the data used for the "Safety gear" function.
The procedure for the safety brake is described in the "Special functions" chapter.
Parameter Description Value range
Factory set-
ting
SB_MOD Activate or deactivate the capture release
OFF:Capture release is deactivated
On: Starting the Safety-Brake-function in the requested direction
by pressing the button "Inspection trip UP" oder "Inspection trip
DOWN"
On
Off
Off
SB_M Default for pulse amplitude with which the motor is to be fed with
current.
The default is calculated as a percentage of the maximum
operating current of the frequency inverter (nominal current x
1.8)
10 ... 100 % 70
SB_T0 Pulse breake
Break time between the individual current pulses
0.1 ... 2.0 s 0.2
SB_T1 Împulse time
Time for which the motor will be fed with current
0.1 ... 1.0 s 0.5
SB_N Number of current pulses
1 ... 5 3
Translation of the original operating instructions
ZETADYN 4C Parameter list
R-TBA12_01-GB 1415 Part.-No. 00163371-GB
92/20
4

 Loading...
Loading...