MS - SOUND decoders MS440 to MS990 and MN - NON-SOUND decoders MN170 to MN340 Page 31
Internal speed steps for the ABC slow speed
Current asymmetry
voltage
(from SW version 4.227)
The CV #100 delivers when read out via PoM (=Prog
On the Main, =OP Prog Mode) the asymmetry voltage
measured AT THE TIME in tenths of a volt. For the
read CV values of CV #100 the following applies:
[…]
2 = 0.2 V Asymmetry right track higher voltage
1 = 0.1 V Asymmetry right track higher voltage
0 = perfectly symmetrical signal
255= 0.1 V Asymmetry left track higher voltage
254= 0.2 V Asymmetry left track higher voltage
[…]
The result is rounded to tenths of a volt, therefore the
last bit may "flicker" a bit (e.g. with a measured rail volt-
age asymmetry of e.g. 1.44 V the CV sometimes re-
turns 14 and sometimes 15 as CV value).
Correction factor for CV
#100
(from SW version 4.227)
CV #101 can be used to define a correction factor in one
of the two directions (only necessary for models with 6pol
NEM 651 interface, where the consumers load one of the
two rails).
Asymmetry threshold
for the
"Asymmetric
DCC - Signal"
(ABC)
1 - 14,
101 - 114,
201 - 214
=
0.1 – 1.4 V
Hundredths digit: smoothing time constant; through this
the asymmetry detection can be made more reliable
(thus slower) or faster.
= 0: fast detection (but higher risk of errors, e.g.: unreli-
able stopping).
= 1: medium-fast detection (approx. 0.5 sec), already
fairly safe (default).
= 2: slow detection (approx. 1 sec), very safe.
tens and ones digit: asymmetry threshold in tenths of a
volt. From this voltage difference between the half-waves
of the DCC signal, the asymmetry is to be registered as
such, and the stopping of the vehicle is is initiated.
= 106 (default) therefore means 0.6 V asymmetry thresh-
old. This normally seems to be an appropriate value; cor-
responding to the typical generation of the asymmetry by
a circuit consisting of a total of 4 diodes.
ABC - commuting
with stopping times in
reverse loops
= 0: no commuting on ABC basis
= 1 - 255: Stopping period (in sec) in the ABC stopping
(=turnaround) sections at the end of the commuting
distance.
ABC - commuting
with additional
pit stops
Only as commuting if CV #193 = 1 - 255
= 0: Commuting without pit stops (see above)
= 1 - 254: Commuting with pit stops
(terminal loops by ABC slow-speed sections,
pit stops defined by ABC stopping sections)
Stopping period (in sec) in the pit stops
= 255: as above but permanent stop in pit stops
(until stop is cancelled).
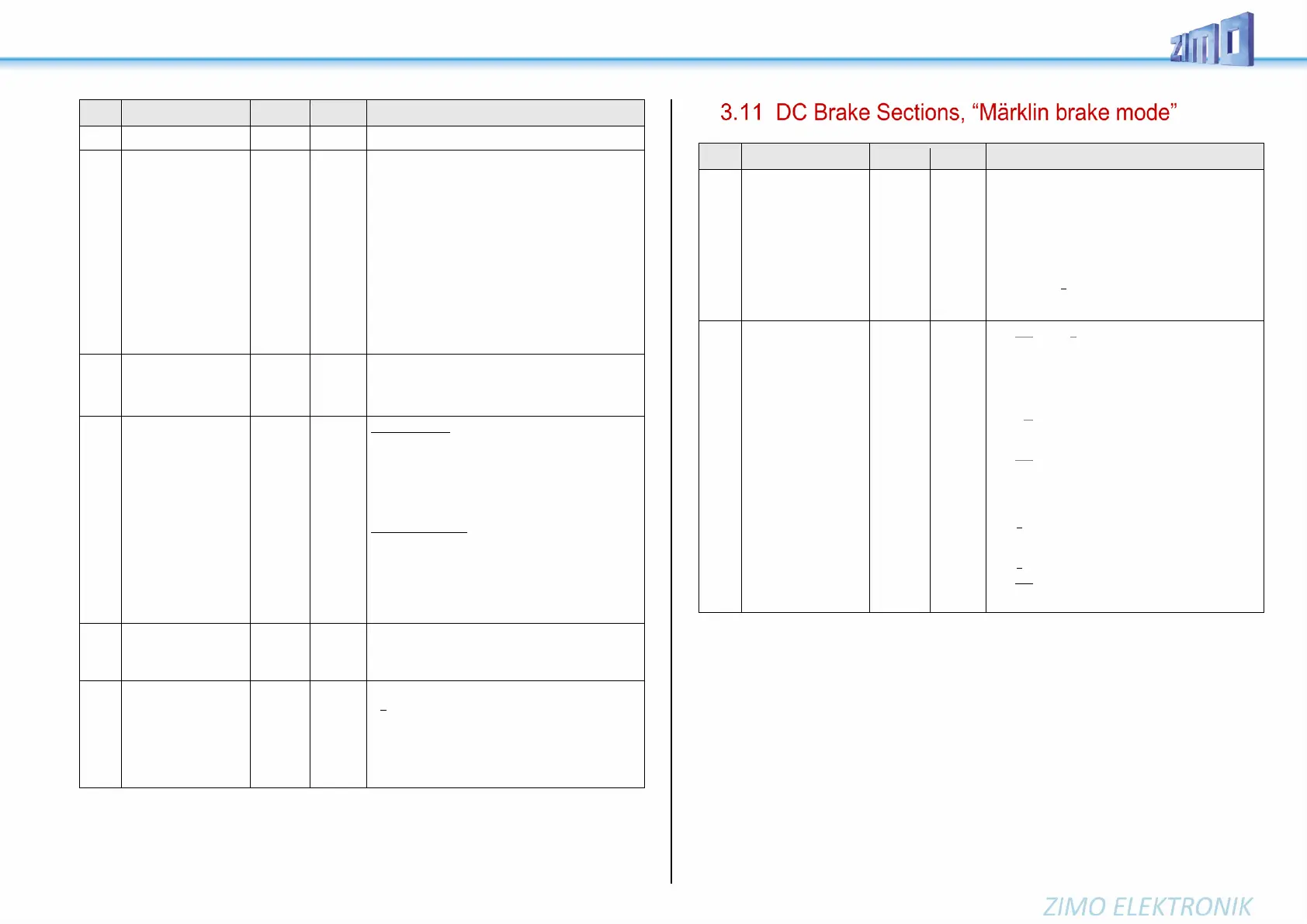
14 =
0000 1110
so
Bit 2 = 1
When using DC brake sections, the automatic switch-
over to analog operation must be switched off.
So that settings in CV #27, bits 4 and 5 are effective:
CV #29, Bit 2 = 0
(e.g. CV #29 = 6, instead of the default value 14)
Bit 0 - Directional behavior
Bit 1 - Number of speed steps
Bit 2 - Automatic switching to analog operation
0 = off, 1 = switched on
Bit 3 - RailCom (bi-directional communication)
Bit 5 - Selection of vehicle address (DCC)
Position-dependent
Stopping
(“before a red signal”)
or driving slowly
by
“asymmetrical DCC sig-
nal“ (“Lenz ABC“)
See chapter
“3.10 Stop in front of a
red signal and driving
slowly by “asymmetrical
DCC-Signal” stops
(Lenz ABC)“
or
“ZIMO HLU”
(see chapter “3.9 ZIMO
“signal-controlled speed
influence” (HLU)”)
or
DC brake sections
(“Märklin brake section”)
0 =
ABC not
active,
HLU
active,
other
brake
sections
not active
Bit 0 and Bit 1 = 0: ABC not activated; no stopping
Bit 0 = 1: Stops are initiated if the voltage in the right
rail (in direction of travel) is higher than in the left rail.
This (CV #27 = 1) is the usual ABC application)
Bit 1 = 1: ABC stops are initiated if the voltage in the left
rail (in direction of travel) is higher than in the right rail.
If bit 0 or bit 1 =1 (only one of the two bits is set):
Stopping is directional, i.e. only in direction of travel to
the signal, travelling in opposite direction has no effect.
Bit 0 and Bit 1 = 1: Stops are independent of direction
of travel. See chapter “3.10 Stop in front of a red
signal and driving slowly by “asymmetrical DCC-
Signal” stops (Lenz ABC)”
Bit 4 - DC braking section, if polarity is reversed
0 = disabled 1 = enabled
Bit 5 - DC braking section, if polarity
is equal to direction of travel
0 = disabled 1 = enabled
Bit 4 and bit 5 = 1: stopping when
DC voltage (e.g. by a diode) independent
of the polarity (“Märklin brake section”)