*HQHUDOLQIRUPDWLRQ
1.4. Calibration scales and correct axis position
3HAC 16578-1 Revision: E14
© Copyright 2003-2007 ABB. All rights reserved.
&DOLEUDWLRQVFDOHV,5%,'
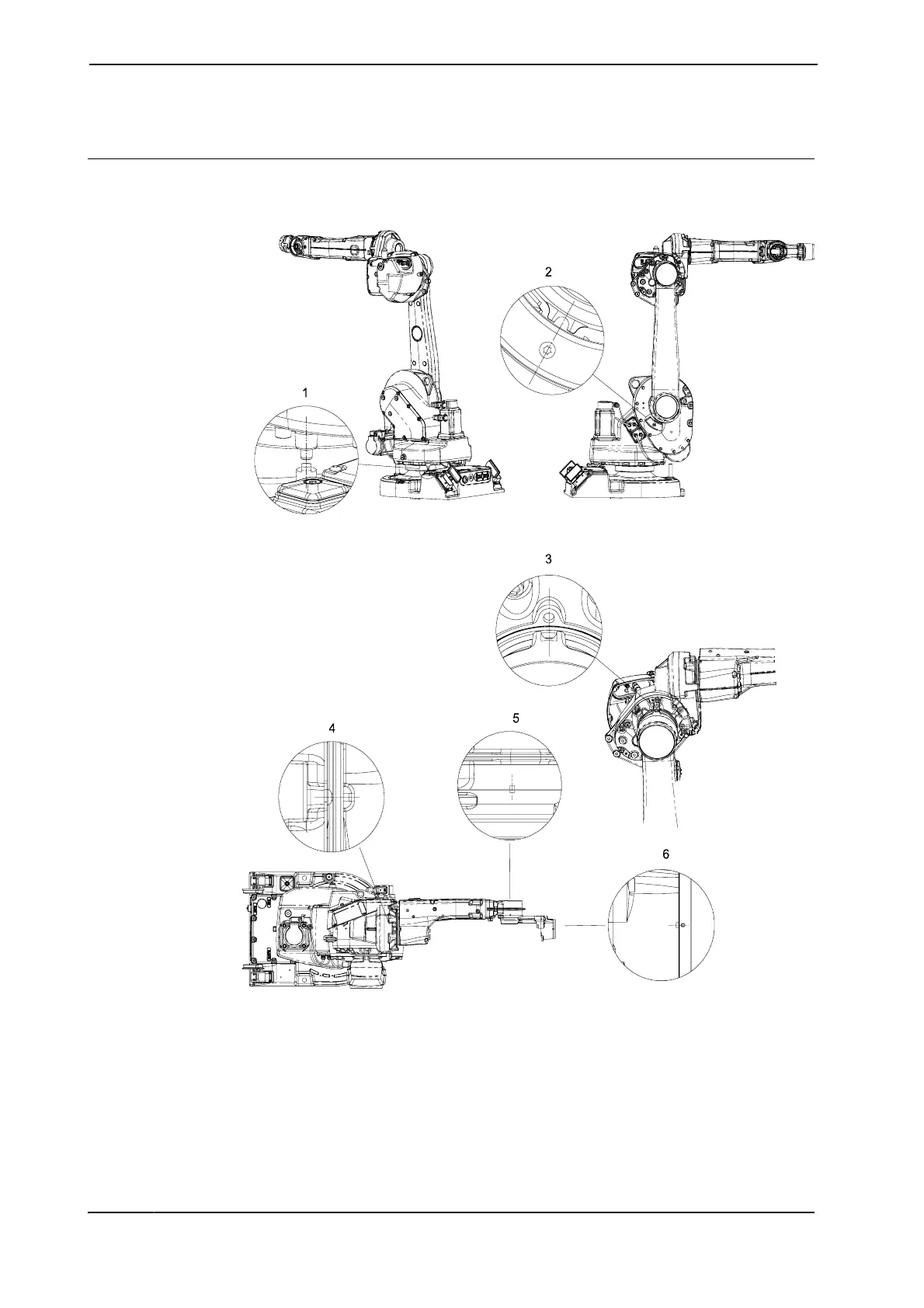
The illustration below shows the calibration marks and correct positions of the six axes of the
robot. The marks shown in the figure are numbered according to the number of the axes.
xx0700000095
&RQWLQXHG
&RQWLQXHVRQQH[WSDJH