&DOLEUDWLRQ
3.2.3. Calibration, all axes, CalPend
3HAC 16578-1 Revision: E40
© Copyright 2003-2007 ABB. All rights reserved.
&DOLEUDWLRQDOOD[HV&DO3HQG
*HQHUDO
This section details how to perform the actual fine calibration of each axis using the
calibration pendulum tools, specified in section (TXLSPHQWIRUFDOLEUDWLRQSHQGXOXPRQSDJH
.
6HQVRUPRXQWLQJSRVLWLRQV
The positions where to fit the calibration pendulum (sensor) differ between different models
and different axes. The positions are shown in &DOLEUDWLRQVHQVRUPRXQWLQJSRVLWLRQV
&DO3HQGRQSDJH.
&DOLEUDWLRQVHTXHQFH
The axes must be calibrated in increasing sequence, i.e. 1 - 2 - 3 - 4 - 5 - 6.
&DOLEUDWLRQZLWKFDOLEUDWLRQSHQGXOXP
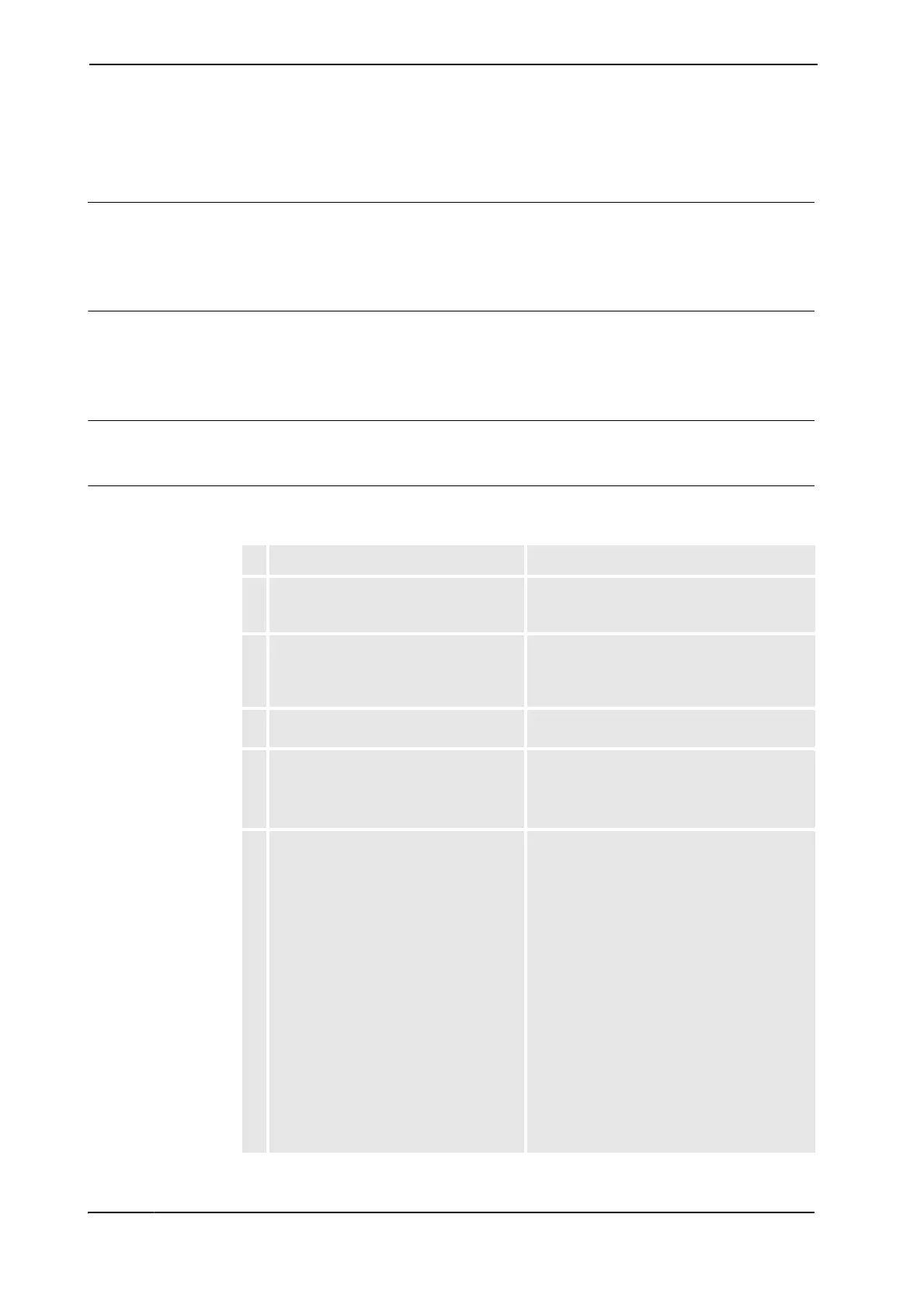
The procedure below details how to fine calibrate the robot with calibration pendulum.
$FWLRQ 1RWH
1. Prepare the robot calibration as detailed
in section 3UHSDULQJWKHFDOLEUDWLRQ
SURFHGXUH&DO3HQGRQSDJH.
2. Jog the robot axes to be calibrated to a
position close to the correct calibration
position.
Use the calibration scales fitted to each robot
axis to locate this position, shown in section
&DOLEUDWLRQVFDOHVDQGFRUUHFWD[LVSRVLWLRQRQ
SDJH.
3. Make a rough calibration. Detailed in section 8SGDWLQJUHYROXWLRQ
FRXQWHUVRQSDJH.
4. 9DOLGIRUD[LVRQO\
Fit the ORFDWLQJSLQ to the robot base.
Make sure the attachment surface is
clean and free from any nicks or burrs.
Shown in section &DOLEUDWLRQVHQVRUPRXQWLQJ
SRVLWLRQV&DO3HQGRQSDJH.
5. Start the calibration service routine from
the teach pendant unit, and follow the
instructions given, including fitting the
calibration sensor when requested.
1RWH After fitting the sensor on the robot
as specified on the teach pendant unit,
FOLFNLQJ2.ZLOOVWDUWURERW
PRYHPHQW!
Make sure nobody is within the working
range of the robot!
The mounting positions for the reference
sensor and calibration sensor respectively,
are shown in &DOLEUDWLRQVHQVRUPRXQWLQJ
SRVLWLRQV&DO3HQGRQSDJH.
1RWH No additional tool is required for fitting
the calibration pendulum for axes 1-3!
Fitting the pendulum to the turning disk
requires an adapter (included in the complete
set). Notice that there are two adapters!
Article numbers are specified in section
&RQWHQWVRIFDOLEUDWLRQSHQGXOXPVHW+$&
RQSDJH.
How to handle the calibration program prior to
the actual calibration of each axis is detailed in
sections &DOLEUDWLRQ3HQGXOXP,,SURFHGXUH
RQ7386&SOXVRQSDJH and &DOLEUDWLRQ
3HQGXOXP,,SURFHGXUHRQ)OH[3HQGDQW,5&
RQSDJH.
&RQWLQXHVRQQH[WSDJH