18 of 19
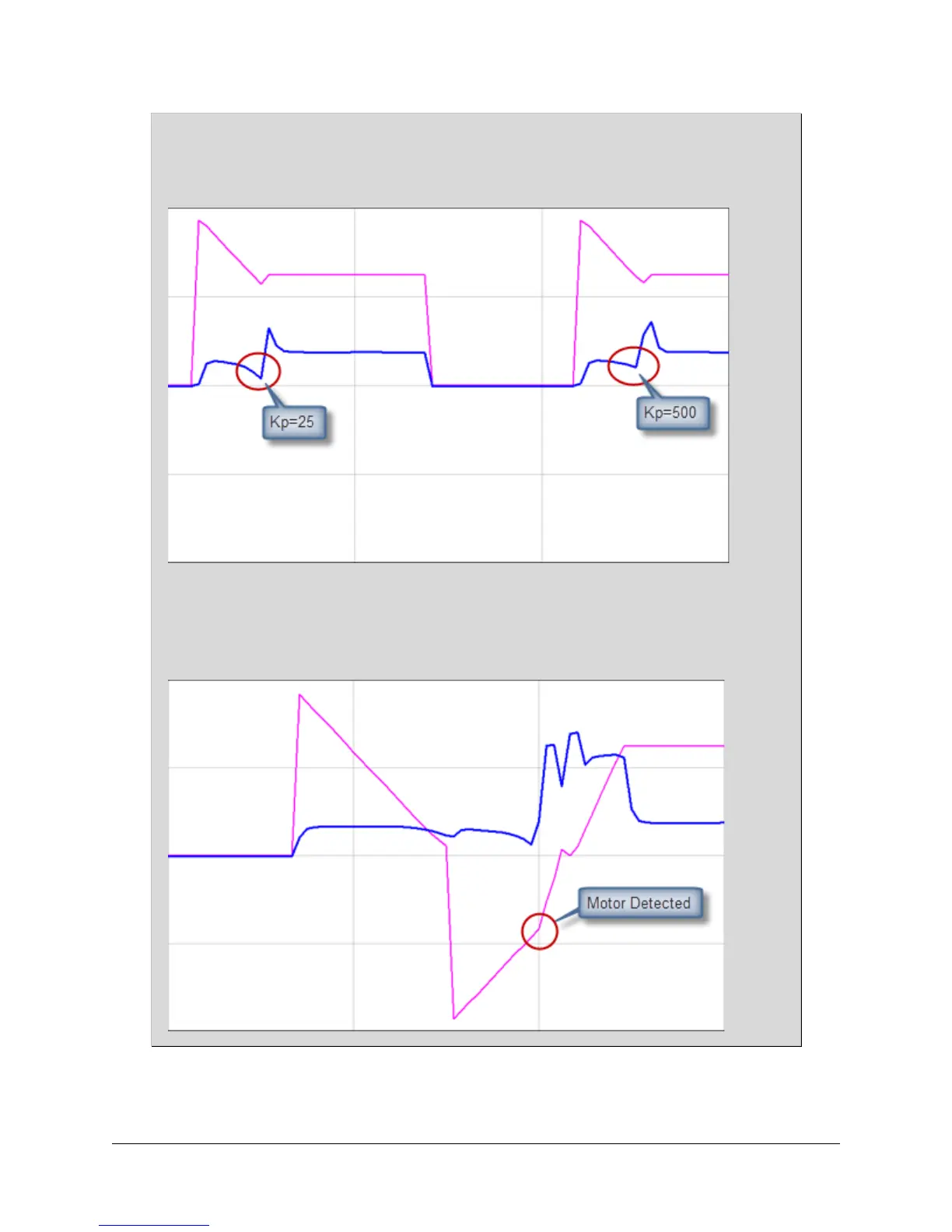
In the chart below, we see two sweep procedures, paying close attention to the current trace in blue. Notice
that in the procedure on the left, the Kp value is set to 25, which results in a deeper dip in current when the
motor has been detected. In the sweep procedure on the right, the Kp value is set to 500, resulting in a
shallower dip of current.
Reverse Sweep
In the case of a motor turning in reverse of commanded direction, a flying start in sweep mode will still work.
The frequency will sweep in the forward direction first, and if it does not detect the motor, will begin sweeping
in the reverse direction. Once the motor has been detected, the drive will safely bring it to a stopped state,
then proceed to bring it to its commanded speed.

 Loading...
Loading...






