7
User’s manual
EN
Frequencies
Transmitter for the robot driving
Frequency band of work (Hz) 500 - 60000
maximum radio frequency power (dBm) < 10
Bluetooth
Frequency band of work (MHz) 2402 - 2480
maximum radio frequency power (dBm) < 14
GSM
Frequency band of work (MHz) 850/900/1800/1900
maximum radio frequency power (dBm) < 33
Equipment / Accessories / Functions
Areas managed, including the
primary zone
4
Rain sensor Standard
Eco Mode -Self-programming
(patented)
Standard
Connect module (GPS, GPRS) Optional Standard
Re-entry method to the charging
station
“V-Meter”-"follow wire"
“V-Meter”-"follow
wire" GPS Assisted
Maximum length of perimeter wire
(approximate, calculated based on a
regular perimeter)
m (') 1000 (3280 ')
(*) Depends on the condition of the grass, lawn and the complexity of the mowing area.
GENERAL DESCRIPTION OF THE APPLIANCE
The appliance is a robot designed and built to automatically trim
grass in gardens and house lawns at any time of the day or night.
It is small, compact, silent and easy to transport.
Depending on the characteristics of the surface to be trimmed,
the robot can be programmed to work on more than one area: a
primary area and secondary areas (according to the specications
of the various models).
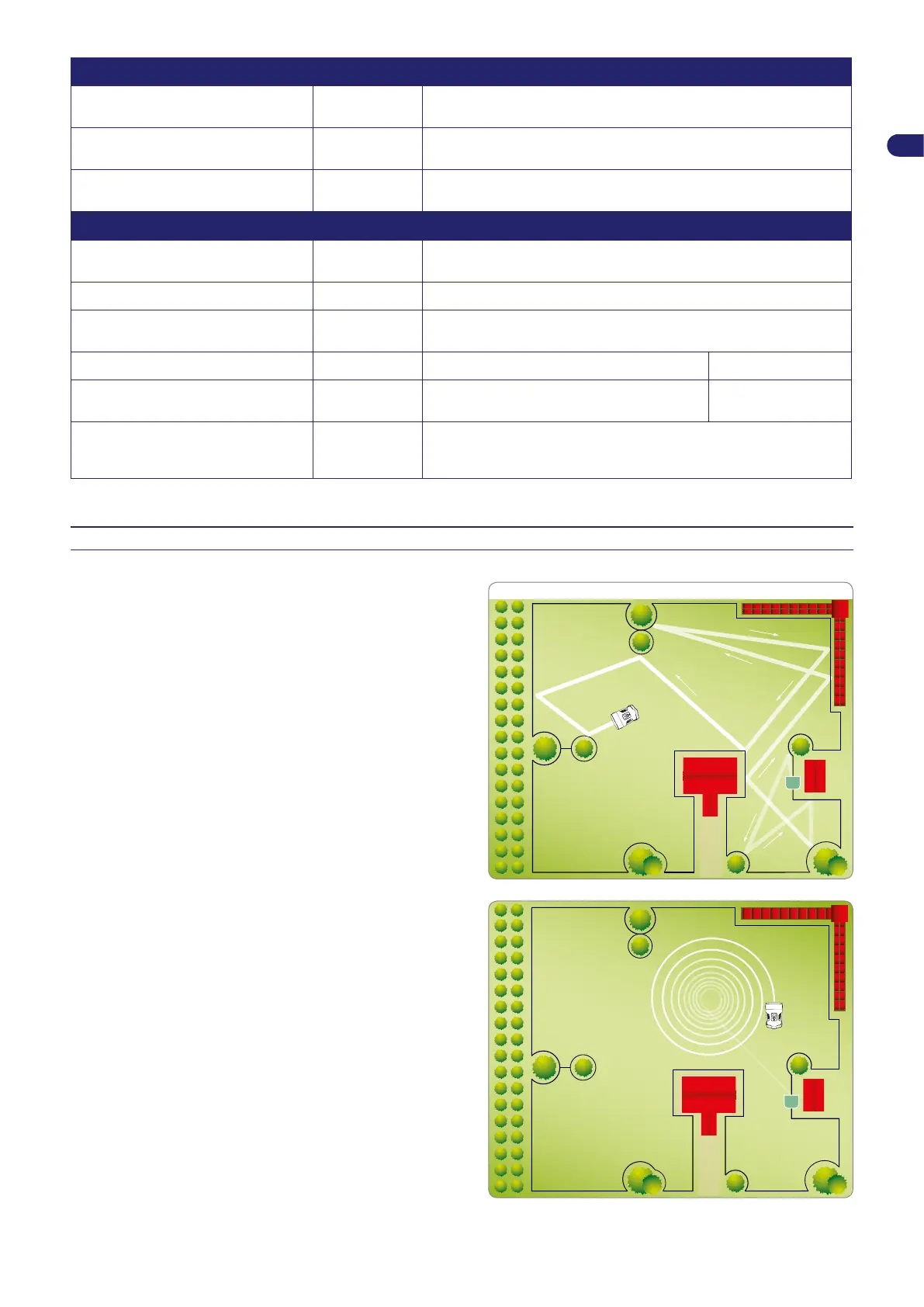
During operation, the robot trims the area marked off by the
perimeter wire.
When the robot detects the perimeter wire or encounters an
obstacle, it changes direction in a random manner and starts
mowing again in a new direction. The robot does not cross the
perimeter wire for a distance greater than half its length.
According to its operating principle random, the robot automatically
trims the entire delimited area of the lawn (see gure).
The robot is able to recognise the presence of higher and/or thicker
grass in an area of the garden and to automatically activate, if
considered necessary, the spiral movement for a perfect nish.
The lawn surface that the robot is able to trim depends on a series
of factors, such as:
•
model of the robot and type of batteries installed;
•
characteristics of the area (irregular perimeters, uneven
surfaces, divided areas, etc.);
•
characteristics of the lawn (type and height of the grass,
moisture, etc.);
•
conditions of the blade (level of sharpness, without residuals
and deposits, etc.);