Overview CoE objects EL6002, EL6022
EL600x, EL602x 185Version: 4.6
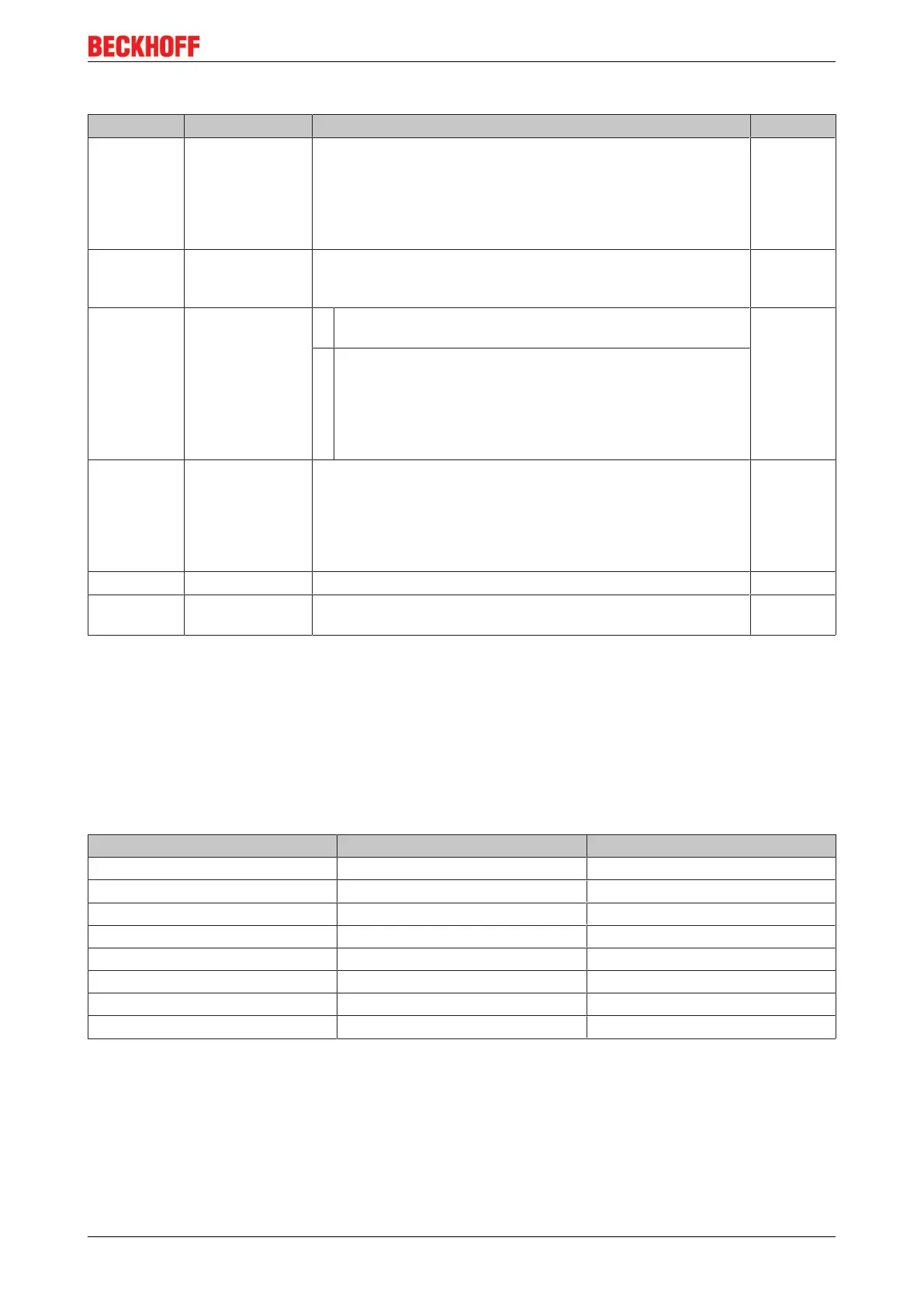
Control data
Bit position Name Meaning Data type
0 Transmit request By changing the state of this bit, the controller informs the
terminal that the DataOut bytes contain the number of bytes
displayed in “Output length”. The terminal acknowledges
receipt of the data by changing the state of the
“TransmitAccepted” bit. Only now new data can be transferred
from the controller to the terminal.
BOOLEAN
1 Receive accepted The controller acknowledges receipt of data by changing the
state of this bit. Only then new data can be transferred from
the terminal to the controller.
BOOLEAN
2 Init request 0 The controller once again requests the terminal to prepare
for serial data exchange.
BOOLEAN
1 The controller requests terminal for initialization. The
transmit and receive functions will be blocked, the FIFO
pointer will be reset and the interface will be initialized with
the values of the responsible Settings object. The execution
of the initialization will be acknowledged by the terminal
with the ‘Init accepted’ bit.
3 Send continuous Continuous sending of data from the FIFO.
The send buffer is filled (up to 128 bytes) by the controller. The
filled buffer contents will be sent on the rising edge of the bit. If
the data has been transmitted, the terminal informs the
controller by setting the “Init accepted” bit. “Init accepted” is
cleared with “SendContinuous”.
BOOLEAN
4...7 -
8...15 Output length Number of output bytes available for transfer from the
controller to the terminal.
UINT8
PDO Assignment
The terminal makes two input/output process images available for each channel. These differ only in the
representation of the control/status data.
In the case of bitwise representation, the data is made available as shown in the tables above. In the case of
word-wise representation, the first 16 bits of the process data are combined in one word.
The process data objects begin as standard with a control/status word. This PDO assignment is required in
order to use the ‘TwinCAT PLC Serial Communication’ library.
Status Inputs Control Outputs Representation
0x1A00 0x1600 bitwise Ch. 1
0x1A01 0x1601 bitwise Ch. 2
0x1A02 0x1602 bitwise Ch. 3
0x1A03 0x1603 bitwise Ch. 4
0x1A04 0x1604 word-wise Ch 1
0x1A05 0x1605 word-wise Ch 2
0x1A06 0x1606 word-wise Ch 3
0x1A07 0x1607 word-wise Ch 4

 Loading...
Loading...

