BL6-U Parallel Integrated Controller Quick Commissioning User Manual
14
5 Motor Initial Angle Tuning (Only for Synchronous Machine)
For machines without attached steel rope and no load, please follow section 1 “Motor Initial
Angle Tuning with no load”. For machines attached with steel rope and have load, please follow
section 2 "Motor Initial Angle Tuning with load".
(The two angle tuning modes can achieve the same effort. Please choose one of them according
to the actual situation.)
5.1 Motor Initial Angle Tuning with no load
Please set PG type F8-02 correctly, set AutoTuneModeSel FC-13 to 0 before perform Motor
initial tuning with no load (Do not attach steel ropes). Procedures required before tuning:
1) Ensure synchronous motor (traction machine) has no load (DO NOT attach steel ropes);
2) Connect running contactor output Y1 (J1-4) and COM1 (J1-5) to make it close;
3) Connect brake contactor output Y0(J1-3) and COM3 (J1-5) to release the brake;
Perform motor initial angle tuning with digital operator based on following procedures shown
below:
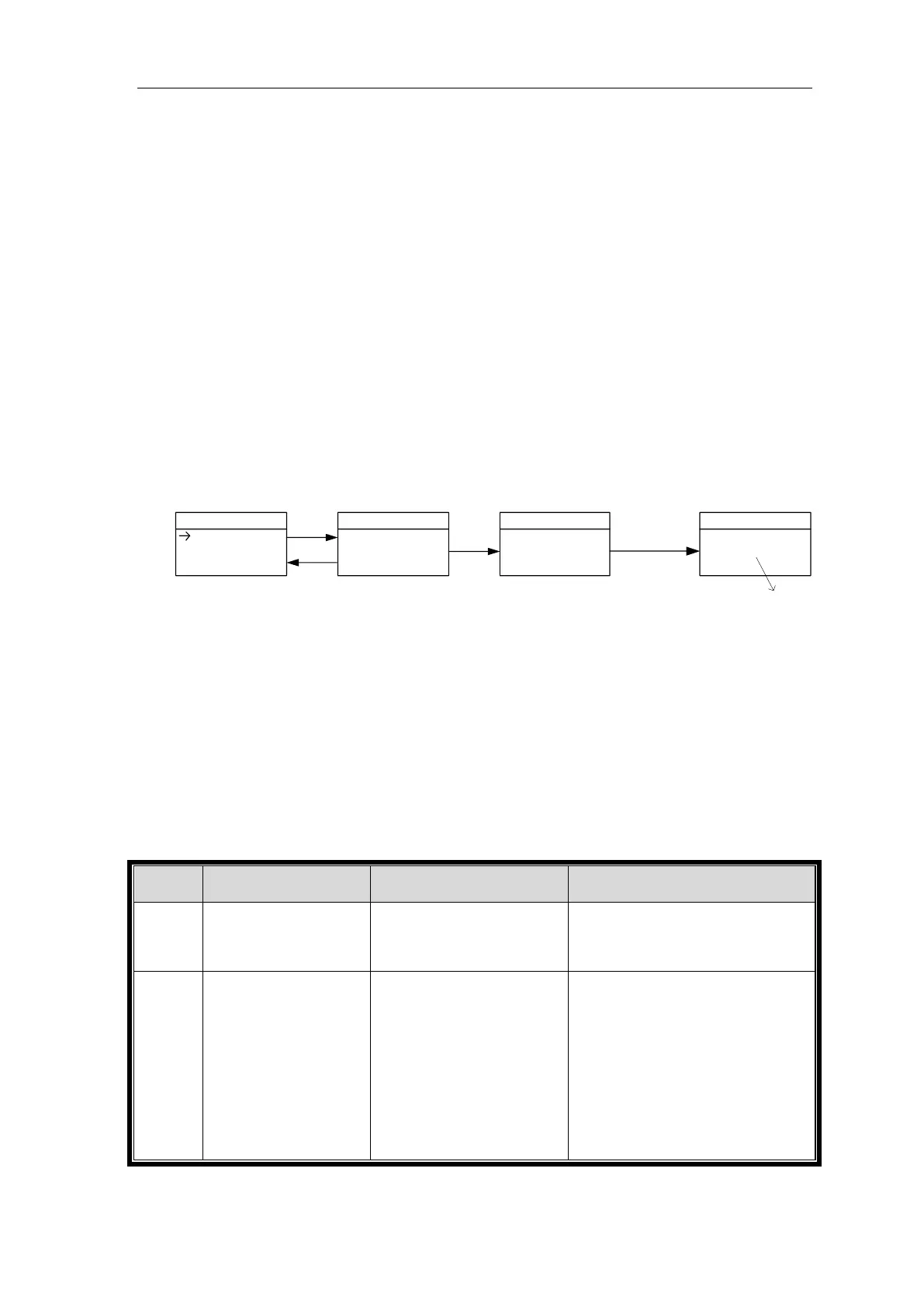
Angle Tune ( X0)
Para Tune ( X1)
Angle Tune ( X0 )
Tune start?
[ENTER]to start
Angle Tune ( X0 )
Tune start
Waiting
Angle Tune ( X0)
Tune End
Success
Display:success
or error codes
[ENTER]
[ENTER]
[ESC]
Press Up or
Down button
Motor Tune
FIGURE 5.1 Motor initial tuning with no load (Do not attach steel ropes) sketch
Note: Rotation angle tuning no longer distinguish encoder type.
After pressing “Enter”, tuning starts. First, motor rotates to a firm position, then it rotates
forward(facing to driving shaft, anticlockwise rotation is forward direction)in a constant speed,
rotation speed and time depends on the pole number and initial position, it stops after maximum
one round rotation, then it rotates to one position and remains for 2 seconds again, motor stops and
indicates success. The whole tuning procedure lasts less than 20 seconds.
Chart 5.1 Motor Initial Angle Rotation Tuning Fault List
Controller fault
The drive has a failure and
cannot do Initial Angle
Rotation Tuning.
Controller has met fault.
First solve fault according to error code,
then angle tuning again. Refer to Chart
VI Driver Fault List.
Give voltage limit
Already give limit force
during angle tuning, but
feedback current cannot
reach least requirement.
1. Incorrect parameters of
motor or encoder;
2. The difference between
the actual parameters of
the motor and the
estimated parameters of
the driver is too large;
3. Power matching imbalance
between motor and driver
(The motor power is far
less than the drive).
1. Check parameters of motor and
encoder;
2. Decrease F5-08 to complete tuning,
then recover F5-08;
3. Check if the power of inverter is
adapted to motor, refer 2.