BL6-U Parallel Integrated Controller Quick Commissioning User Manual
15
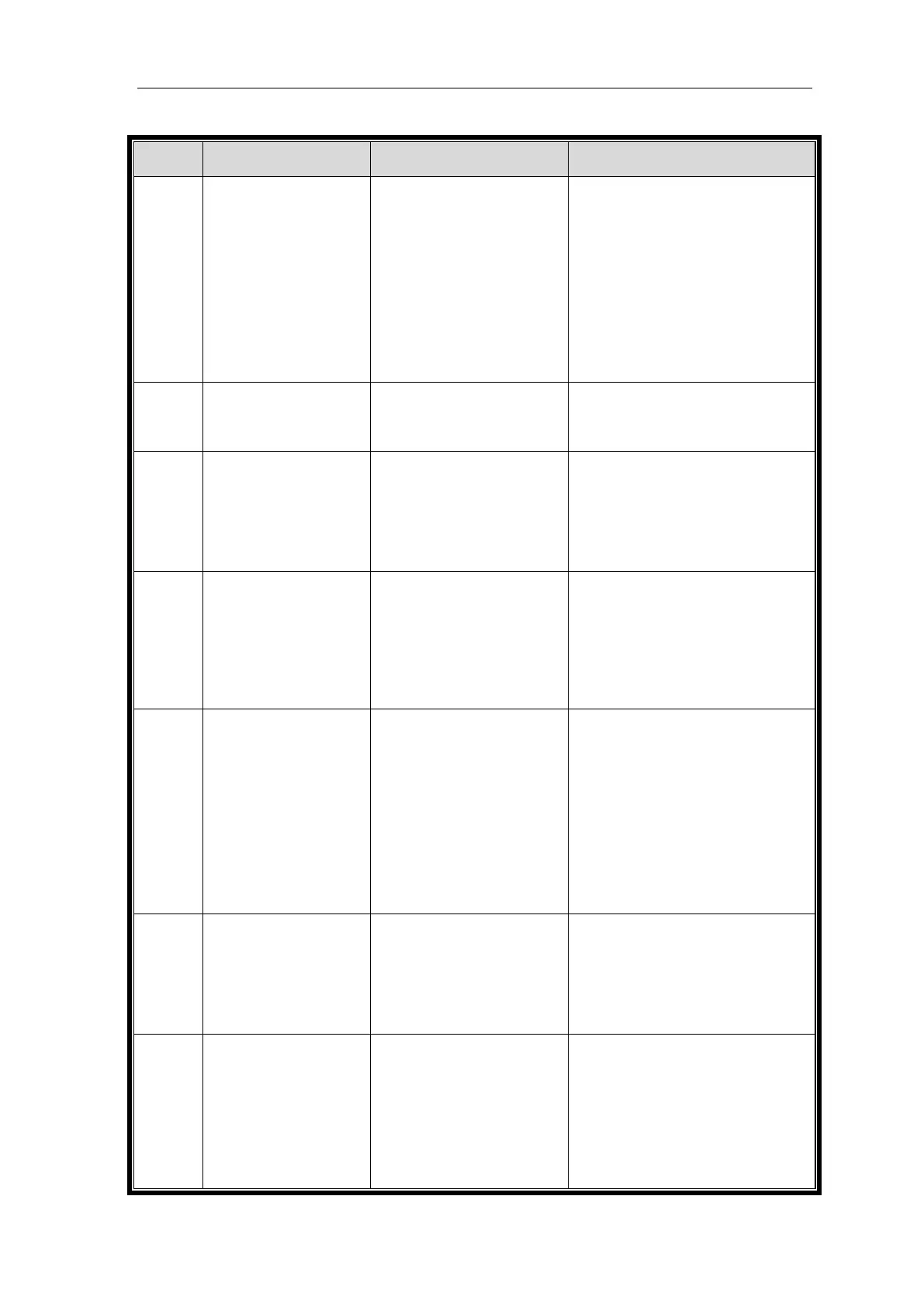
Chart 5.1 Motor Initial Angle Rotation Tuning Fault List (Cont'd)
Output current over limit
During the tuning process,
the driver controller
detects that the output
current has reached the
limit and stops the output,
indicating that the current
is out of limit.
1. Incorrect parameters of
motor or encoder;
2. The difference between
the actual parameters of
the motor and the
estimated parameters of
the driver is too large;
3. Power matching
imbalance between motor
and driver (The motor
power is far more than the
drive).
1. Check parameters of motor and
encoder;
2. Increase F5-08 to complete tuning,
then recover F5-08;
3. Check if the power of inverter is
adapted to motor, refer 2.
ESC input
During the tuning process,
ESC input is effective, and
self-tuning is cancelled.
The hand operator triggers the
ESC button to cancel angle
tuning.
Angle tuning interruption, failure to
complete, please do angle tuning again.
Over time at zero speed
In the process of tuning,
when the rotor is
positioned, the feedback
speed is not zero for a
long time, and it cannot
locate accurately.
1. Motor carrying partial
load;
2. Bad feedback speed of
encoder.
1. Ensure brake is off;
2. Remove interference of encoder.
CD signals of encoder is
abnormal
In the process of tuning, it
is found that CD feedback
position value is
abnormal, and it is
impossible to identify the
CD line sequence.
1. Parameters of motor or
encoder have been
wrongly input;
2. Interference in encoder;
3. Error input of motor or
encoder;
4. Wrong PG type set.
1. Check CD signals wiring;
2. Remove interference;
3. Verify parameters of motor and
encoder;
4. Check PG type set.
Motor does not rotate
In the process of tuning,
the driver cannot control
the normal rotation of the
motor.
1. Encoder connection fault,
no feedback speed;
2. Motor has load or brake
close;
3. The power difference
between the motor and
the driver is too large and
does not match.
1. Check encoder A&B signal
connection, elimination of encoder
signal interference;
2. Make sure motor has no load &
brake open;
3. Check the parameters of the
number of the motor and the
number of the encoder;
4. Detect of power matching of motor
and driver controller, reduce the
rated current [F5-08], and resume
F5-08 after tuning.
Motor rotates in wrong
direction
In the process of tuning,
the direction of the motor
is not consistent with the
control direction, and
there is a reverse rotation.
Motor phase sequences does
not match encoder.
1. Adjust motor phase sequence;
2. Adjust encoder A-, A+ or B-, B+.
Encoder R pulse signal
error
R pulse signal was not
detected for a long time in
the process of tuning.
1. No detection of R pulse
signal;
2. Interference of encoder
signal;
3. Error input of motor or
encoder;
4. In the course of tuning,
the motor is rotated in
distress.
1. Check wiring for R pulse signal;
2. Elimination of encoder signal
interference;
3. Verifying the number of motor
poles and the number of encoder
lines;
4. Open or close the brake in the
process of self-learning.
 Loading...
Loading...