BL6-U Parallel Integrated Controller Quick Commissioning User Manual
17
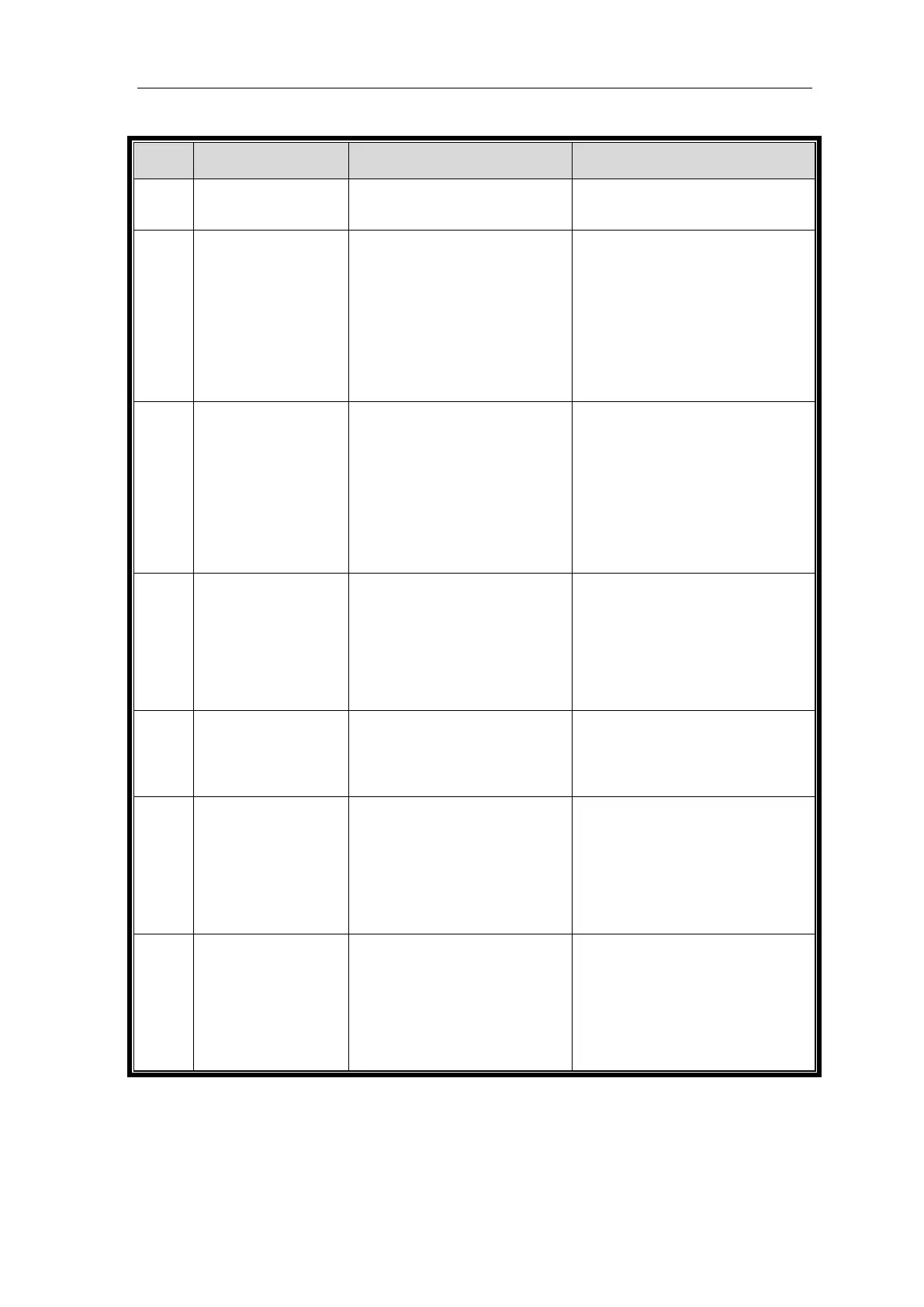
Chart 5.2 Motor initial Angle tuning with load (attach steel ropes) error code
Controller fault
The drive has fault and
cannot do tuning.
First solve fault according to error code,
then angle tuning again. Refer to Chart
VI Driver Fault List.
Give voltage limit
Already give limit force
during angle tuning, but
feedback current
cannot reach least
requirement.
1. Incorrect parameters of motor
or encoder;
2. The difference between the
actual parameters of the motor
and the estimated parameters
of the driver is too large;
3. Power matching imbalance
between motor and driver (The
motor power is far less than
the drive).
1. Check parameters of motor and
encoder;
2. Decrease F5-08 to complete
tuning, then recover F5-08;
3. Check if the power of inverter is
adapted to motor, refer 2.
Output current over
limit
During the tuning
process, the driver
controller detects that
the output current has
reached the limit and
stops the output,
indicating that the
current is out of limit.
1. Incorrect parameters of motor
or encoder;
2. The difference between the
actual parameters of the motor
and the estimated parameters
of the driver is too large;
3. Power matching imbalance
between motor and driver (The
motor power is far more than
the drive).
1. Check parameters of motor and
encoder;
2. Increase F5-08 to complete tuning,
then recover F5-08;
3. Check if the power of inverter is
adapted to motor, refer 2.
ESC input
During the tuning
process, ESC input is
effective, and
self-tuning is cancelled.
1. Release Up or Down button
while tuning;
2. Fault occurs during angle
tuning.
1. Angle tuning interruption, failure
to complete, please do angle
tuning again. Do not forced to run,
there is a danger of losing control.
2. Check whether there is elevator
logic fault, resulting in stop tuning.
Refer to Chart V Elevator System
Faults List.
Over time at zero speed
Over time at zero speed
Before start, feedback
speed is not zero for a
long time
1. Brake open or brake force is
not enough;
2. There’s interference in encoder.
1. Ensure brake is off;
2. Remove interference of encoder.
Current detection error
During the tuning
process, the feedback
current value
ultra-lower limit and
the self-tuning
condition is not
satisfied.
1. Broken circuit at load side or
lack of phase;
2. Imbalance phase of motor side
or rated current wrongly set;
3. Inverter cannot adapt to motor.
(Motor capacity is highly lower
than inverter)
1. Ensure 3-phase connection to
motor;
2. Ensure motor parameters setting;
3. Ensure motor should adapt to
inverter.
CD signals of encoder is
abnormal
In the process of tuning,
it is found that CD
feedback position value
is abnormal, and it is
impossible to identify
the CD line sequence.
1. Parameters of motor or
encoder have been wrongly
input;
2. Interference in encoder;
3. Error input of motor or
encoder;
4. Wrong PG type set.
1. Check CD signals wiring;
2. Remove interference;
3. Verify parameters of motor and
encoder;
4. Check PG type set.
 Loading...
Loading...