BL6-U Parallel Integrated Controller Quick Commissioning User Manual
18
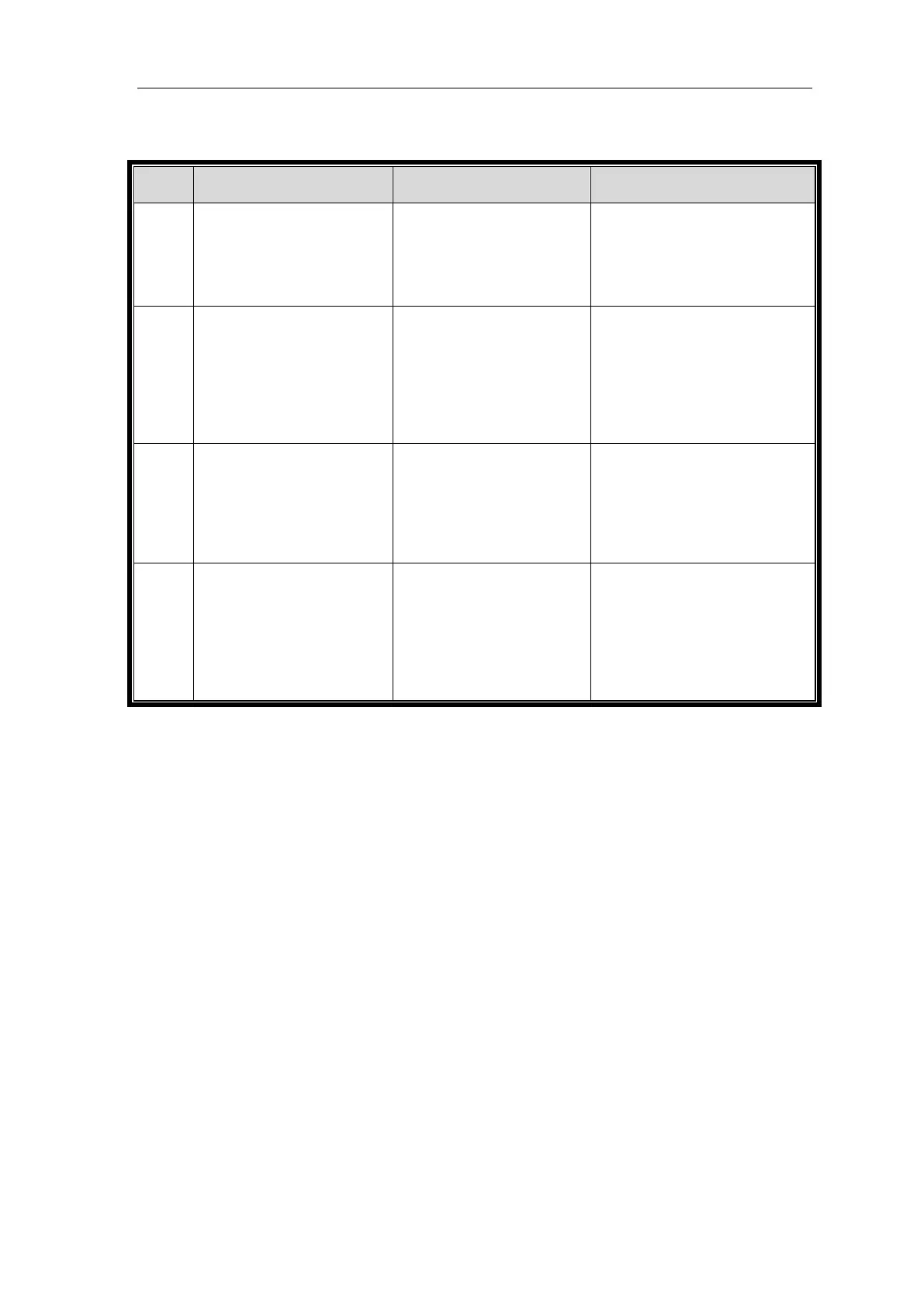
Chart 5.2 Motor initial Angle tuning with load (attach steel ropes) error code (Cont'd)
Motor moved while static
angle calculation
When the motor angle position
is inferred static, the motor
cannot rotate to obtain the
determined current position.
1. Brake open or brake force
is not enough;
2. Bad encoder wire or
interference in encoder.
1. Ensure brake is closed;
2. Check encoder A, B signals,
remove interference
Detection current is too small
In the Initial angle static tuning
process, the output current
value is lower than the lower
limit, and the tuning condition
is not satisfied.
1. The rated current of the
motor may not be in
conformity with the actual
motor;
2. Motor/Controller
connection is incorrect.
(Break circuit or phase
lost)
1. Check motor/controller
connection;
2. Check rated current and rated
power of motor.
Encoder R pulse signal lost
No encoder R pulse signal
detected after motor tuning for
10s
1. Interference in R pulse
signal;
2. A & B signals connection
error;
3. Inspection elevator speed
setting is too low.
1. Check the encoder wiring;
2. Remove the encoder
interference;
3. Ensure the normal operation of
the motor;
4. Inspection elevator speed
setting is too low.
While static angle tuning,
motor speed is over proof
During static angle tuning, after
initial location, motor need to
rotate for 3 rounds. During
rotating, system give out speed
but receive no feedback and
the lasting time of this status
has been over limit. Then
system announce error.
1. Check if there is feedback from
SIN/COS encoder;
2. Check the phase of power
input.
Note:
1. Above description is for SIN/COS encoder;
2. For increment encoder, RF231 correspond to UVW signals, RF234 and RF239
correspond to Z pulse. The solution is same, and other faults are same too.