Chapter 6 Control Modes of Operation
P2 - 02
PFG Position Feed Forward Gain Address: 0204H, 0205H
Default: 50 Related Section:
Applicable Control Mode: PT, PR Section 6.2.8
Unit: %
Range: 0 ~ 100
Data Size: 16-bit
Display Format: Decimal
Settings:
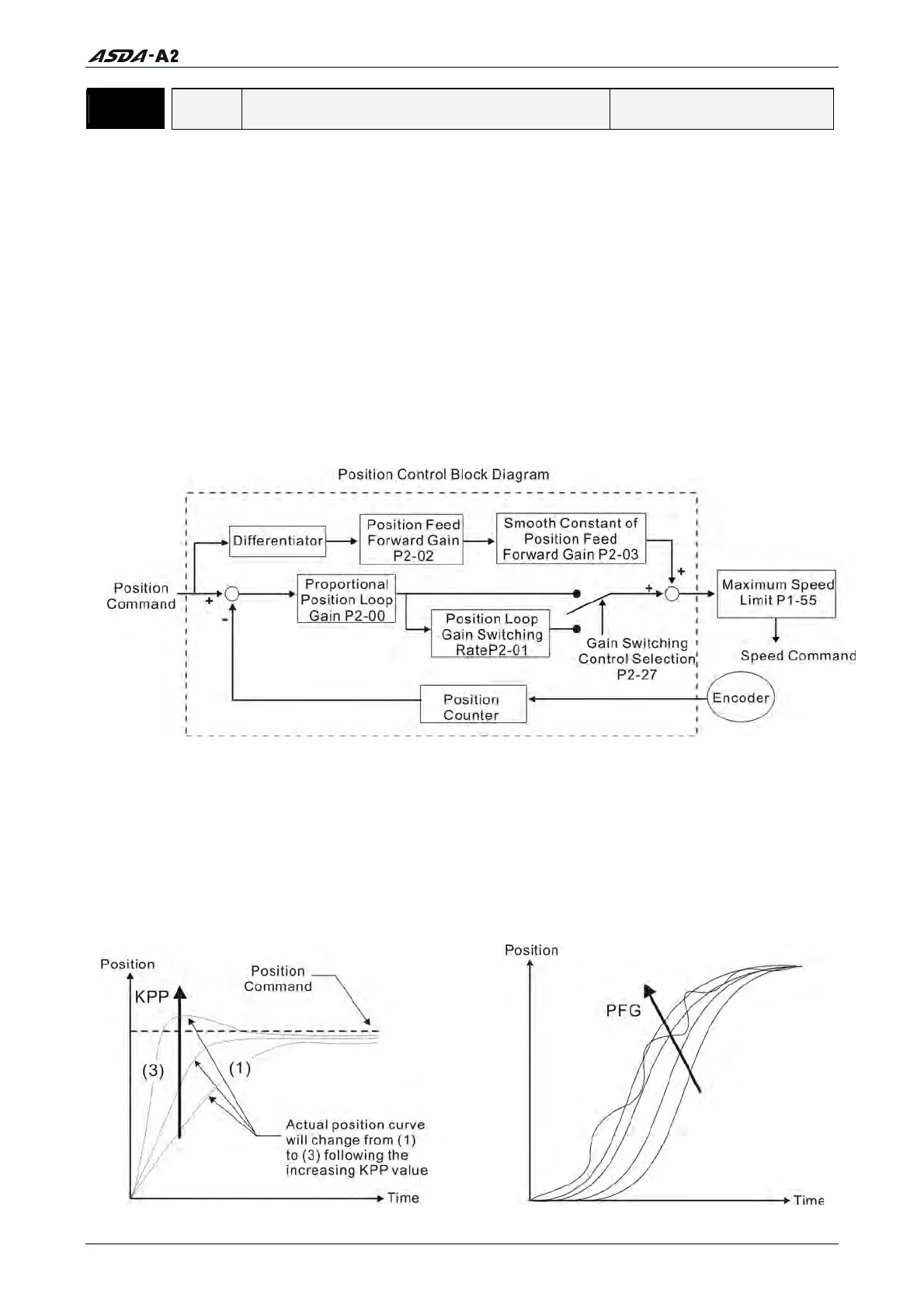
This parameter is used to set the feed forward gain when executing position
control command. When using position smooth command, increase gain can
improve position track deviation. When not using position smooth command,
decrease gain can improve the resonance condition of mechanical system.
When the value of Proportional Position Loop Gain, KPP is too great, the position loop
responsiveness will be increased and it will result in small phase margin. If this happens,
the rotor of motor will oscillate. At this time, the users have to decrease the value of KPP
until the rotor of motor stop oscillating. When there is an external torque command
interrupted, over low KPP value will let the motor cannot overcome the external strength
and fail to meet the requirement of reasonable position track error demand. Adjust feed
forward gain, PFG (P2-02) to efficiently reduce the dynamic position track error.
Revision January 2011 6-17
Call 1(800)985-6929 for Sales
Call 1(800)985-6929 for Sales