Chapter 7 Motion Control Functions
10) Homing Definition: P6-00 ~ P6-01, (64 bits), total 1 group.
Bit
31 ~ 28 27 ~ 24 23 ~ 20
19 ~ 16
15 ~ 12
11 ~ 8 7 ~ 4 3 ~ 0
DW0
BOOT - DLY DEC2 DEC1 ACC PR BOOT
DW1 ORG_DEF (32 bit)
PR: 0 ~ 3F. PR style (4 bits)
0: Stop mode. Motor stops after homing is completed.
1~63 (01 ~ 3F): Auto mode. Motor goes the dedicated PR 1 ~ 63 after homing is completed.
ACC: Acceleration time
DEC1 / DEC2: 1st deceleration time / 2nd deceleration time..
DLY: Delay time
BOOT: Boot mode. Disable or enable homing function when the servo drive is applied to
power (power on).
0: Disable homing function
1: Enable homing function (when the servo drive is applied to power, first time Servo On)
ORG_DEF: Homing definition value which is determined by the parameter P6-01. The homing
definition value does not necessarily have to be 0.
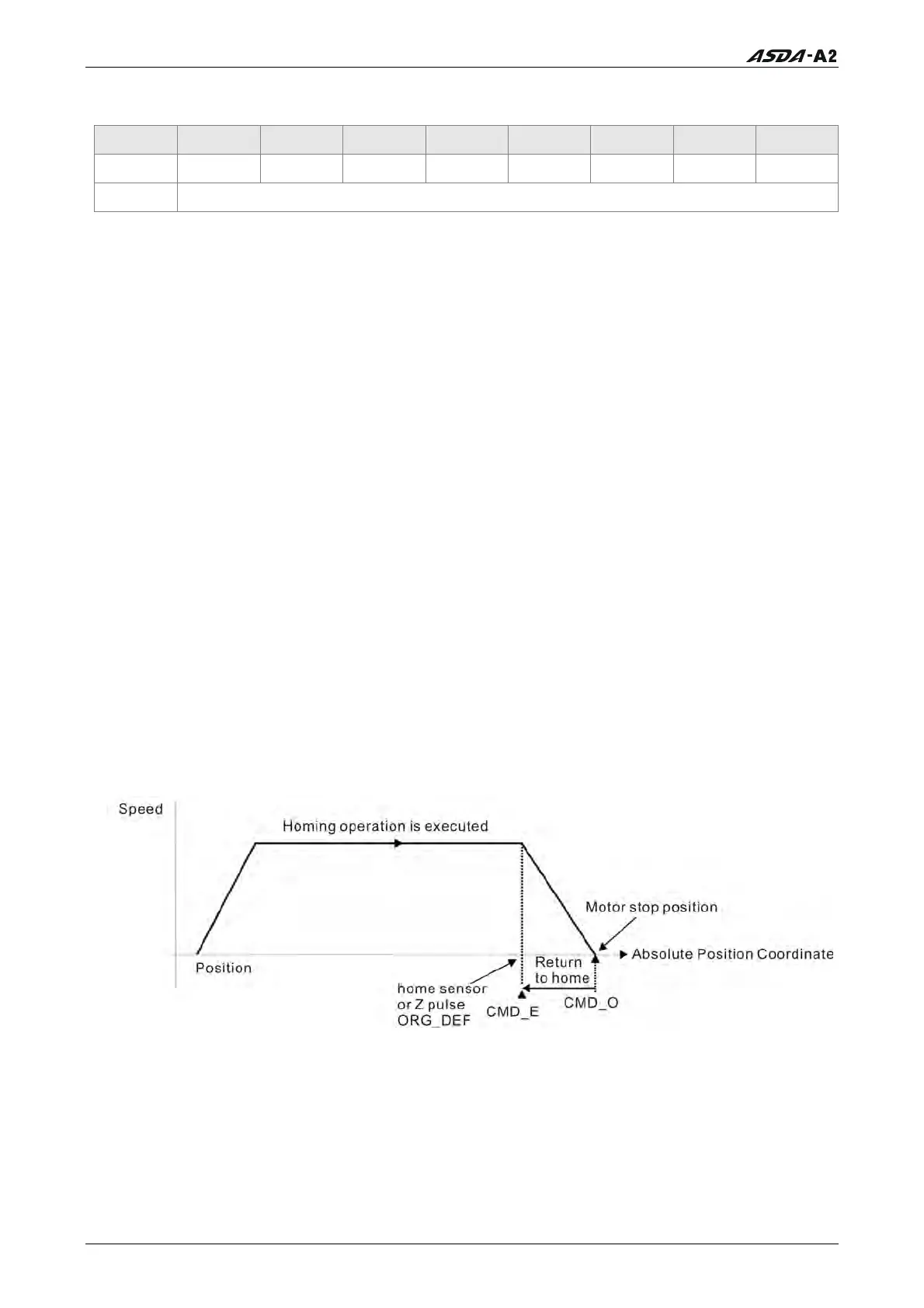
1) ASDA-A2 series does not provide the functions that find Z pulse and regard Z pulse as
“Home”. Therefore, it needs to decide if the motor return to Z pulse position when homing
operation is completed.
After home sensor or Z pulse is found, the motor must accelerate to stop. Generally, the
motor stop position will be a little ahead of the position of Z pulse.
Do not return to Z pulse: Set PR=0
Return to Z pulse: Set PR=a non-zero value and set absolute position command= ORG_DEF.
CMD_O:Command Output Position
CMD_E:Command End Position
Revision January 2011 7-23
Call 1(800)985-6929 for Sales
Call 1(800)985-6929 for Sales