3. Instruction Set
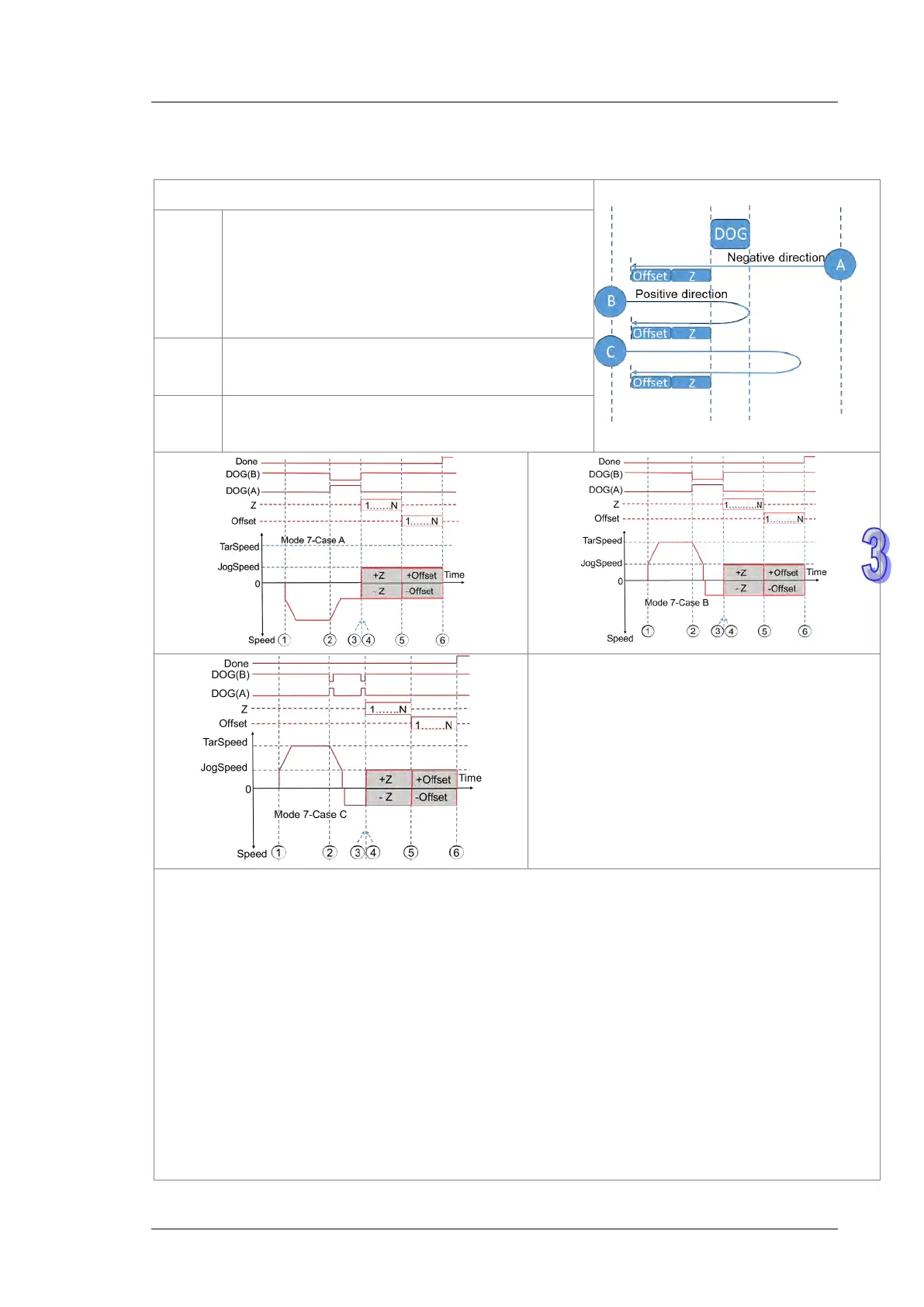
Mode 7:After Mode 1 is finished, seek the set number of Z phases and then output the offset
position.
Description of cases under mode 7
Case A
The motion starts in the negative direction. As the
DOG point is encountered, the axis starts to
decelerates until the JOG speed is reached and
then the search for Z phases starts. After the last Z
phase is counted to, the offset position output
begins. When offset outputs are completed, the axis
stops right away.
Case B
The motion starts in the positive direction; the
deceleration time is less than the duration for the
DOG signal.
Case C
The motion starts in the positive direction; the
deceleration time is greater than the duration for the
DOG signal.
① The DPUZRN instruction is started and the motion accelerates from the speed specified by
JogSpeed to the target speed specified by TarSpeed (positive direction: the value > 0 or negative
direction: the value < 0) and then the motion goes on at the target speed.
② After the DOG signal appears, the DOG signal is left in the following directions according to the
selected mode.
In the previous direction as Case A shows, the axis decelerates to the JOG speed and then
prepares for leaving the DOG signal.
In the positive direction as CaseB/CaseC shows, the axis decelerates to the JOG speed and then
stops. After that, the axis continues at the JOG speed in the opposite direction and prepares for
moving away from the DOG signal.
③ After the DOG signal is moved away from, the search for a set number of Z phases (positive
direction: the value > 0 or negative direction: the value < 0).
④ The first Z phase pulse is counted from.
⑤ When counting to the N
th
Z phase pulse, the first offset pulse output starts (positive direction: the
value > 0 or negative direction: the value < 0).
⑥
th
offset pulse output is completed, the axis stops immediately.