Chapter 4 Description of Parameters | VFD-VJ
4-67
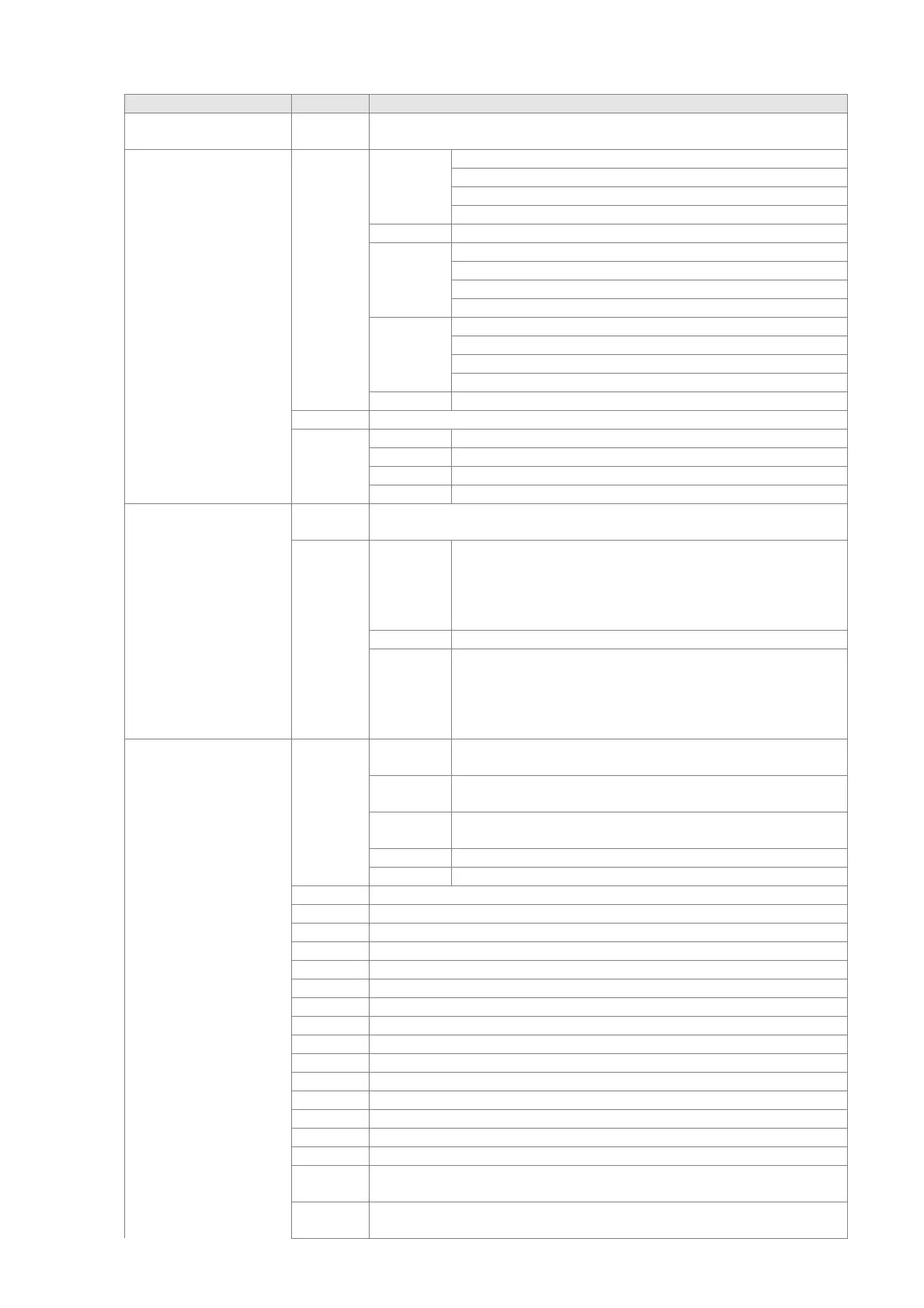
4. Address list
Content Register Function
Hybrid servo drive
parameters
GGnnH
GG means parameter group, nn means parameter number, for
example, the address of Pr.04-01 is 0401H.
Command write only 2000H bit 1~0 00B: No function
01B: Stop
10B: Run
11B: Enable JOG
bit 3~2 Reserved
bit 5~4 00B: No function
01B: FWD
10B: REV
11B: Change direction
bit 14~13 00B: No function
01B: Operated by digital keypad
10B: Operated by Pr.00-21
11B: Change source of operation command
bit 15 Reserved
2001H Frequency command(Set Pr.00-06=0, Input XXX.XX Hz)
2002H bit 0 1: EF (external fault) on
bit 1 1: Reset
bit 2 1: B.B ON
bit 15~3 Reserved
Status monitor read
only
2100H
High byte: Warn code
Low Byte: Error code
2101H
bit 1~0
Hybrid servo drive operation status
00B: Drive stops
01B: Drive decelerating
10B: Drive standby
11B: Drive in operation
bit 2 1: Reserved
bit 4~3
Operation direction
00B: FWD run
01B: From REV run to FWD run
10B: From FWD run to REV run
11B: REV run
bit 8
1: Master frequency controlled by communication
interface
bit 9
1: Master frequency controlled by analog signal or
external input terminals.
bit 10
1: Operation command controlled by communication
interface
bit 11 1: Parameter locked
bit 12~15 Reserved
2102H Frequency command (XXX.XX Hz)
2103H Output frequency (XXX.XX Hz)
2104H Output current (XX.XX A).
2105H DC bus voltage (XXX.X V)
2106H Output voltage (XXX.X V)
2107H Reserved
2108H Reserved
2116H Multi-function display (Pr.00-04)
2200H Display output current (A)
2201H Reserved
2202H Actual output frequency (XXX.XX Hz)
2203H DC bus voltage (XXX.X V)
2204H Output voltage (XXX.X V)
2205H Power angle (XXX.X)
2206H Display actual motor speed kW of U, V, W (XXXXX kW)
2207H
Display motor speed in rpm estimated by the drive or encoder
feedback (XXXXX rpm) (Pr.00-04 #7)
2208H
Display positive / negative output torque in %, estimated by the motor
drive (t0.0: positive torque, -0.0: negative torque) (XXX.X %)
 Loading...
Loading...