Chapter 16 PLC Function ApplicationsC2000-HS
16-139
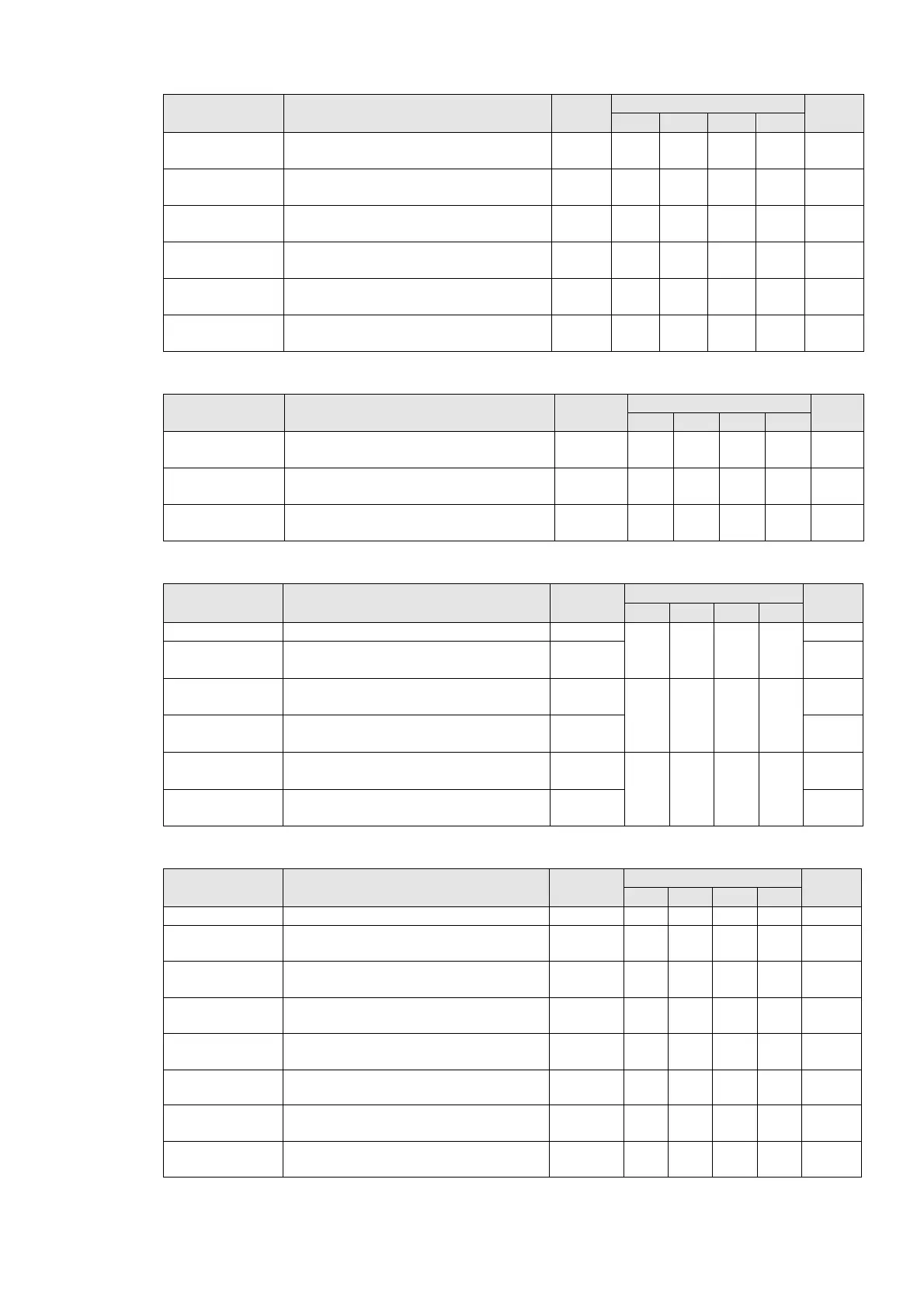
Velocity Control
Special D Description of Function Default
PDO Default
R/W
1 2 3 4
D2001+100*n
Torque restriction on slave station
number n
0 RW
D2012+100*n
Target speed of slave station number
n (rpm)
0 ● RW
D2013+100*n
Actual speed of slave station number
n (rpm)
0 ▲ R
D2014+100*n
Error speed of slave station number n
(rpm)
0 R
D2015+100*n
Acceleration time of slave station
number n (ms)
1000 RW
D2016+100*n
Deceleration time of slave station
number n (ms)
1000 RW
Torque control
Special D Description of Function Default
PDO Default
R/W
1 2 3 4
D2017+100*n
Target torque of slave station number
n(-100.0% – +100.0%)
0 ● RW
D2018+100*n
Actual torque of slave station number
n(XX.X%)
0 ▲ R
D2019+100*n
Actual current of slave station number
n(XX.XA)
0 R
Position control
Special D Description of Function Default:
PDO Default:
R/W
1 2 3 4
D2020+100*n Target of slave station number n (L) 0
●
RW
D2021+100*n Target of slave station number n (H) 0 RW
D2022+100*n
Actual position of slave station
number n (L)
0
▲
R
D2023+100*n
Actual position of slave station
number n (H)
0 R
D2024+100*n
Speed chart of slave station number n
(L)
10000
RW
D2025+100*n
Speed chart of slave station number n
(H)
0 RW
Remote I/O
Special D Description of Function Default:
PDO Default:
R/W
1 2 3 4
D2026+100*n MI status of slave station number n 0 ▲ R
D2027+100*n MO setting of slave station number n 0 ● RW
D2028+100*n AI1 status of slave station number n 0 ▲ R
D2029+100*n AI2 status of slave station number n 0 ▲ R
D2030+100*n AI3 status of slave station number n 0 ▲ R
D2031+100*n
O1 setting of slave station number n 0 ● RW
D2032+100*n
O2 setting of slave station number n 0 ● RW
D2033+100*n
O3 setting of slave station number n 0 ● RW

 Loading...
Loading...