Chapter 12 Description of Parameter SettingsC2000-HS
12.1-02-16
Settings Functions Descriptions
31
Y-connection for the
Motor coil
Active when Pr. 05-24=1, the frequency output is lower than Pr.
05-23 minus 2Hz, and the time is longer than Pr. 05-25.
32
△ -connection for the
Motor coil
Active when Pr. 05-24=1, the frequency output is higher than Pr.
05-23 plus 2Hz, and the time is longer than Pr. 05-25.
33
Zero speed (actual
output frequency)
Active when the actual output frequency is 0. (the drive is in RUN
mode)
34
Zero speed includes
stop (actual output
frequency)
Active when the actual output frequency is 0 or Stopped.
35
Error output selection 1
(Pr. 06-23)
Active when Pr. 06-23 is ON.
36
Error output selection 2
(Pr. 06-24)
Active when Pr. 06-24 is ON.
37
Error Output Selection 3
(Pr. 06-25)
Active when Pr. 06-25 is ON.
38
Error output selection 4
(Pr. 06-26)
Active when Pr. 06-26 is ON.
39
Position reached
(Pr. 10-19)
Active when the PG position control point reaches Pr. 10-19.
40
Speed reached
(including stop)
Active when the output frequency reaches the setting frequency or
stopped.
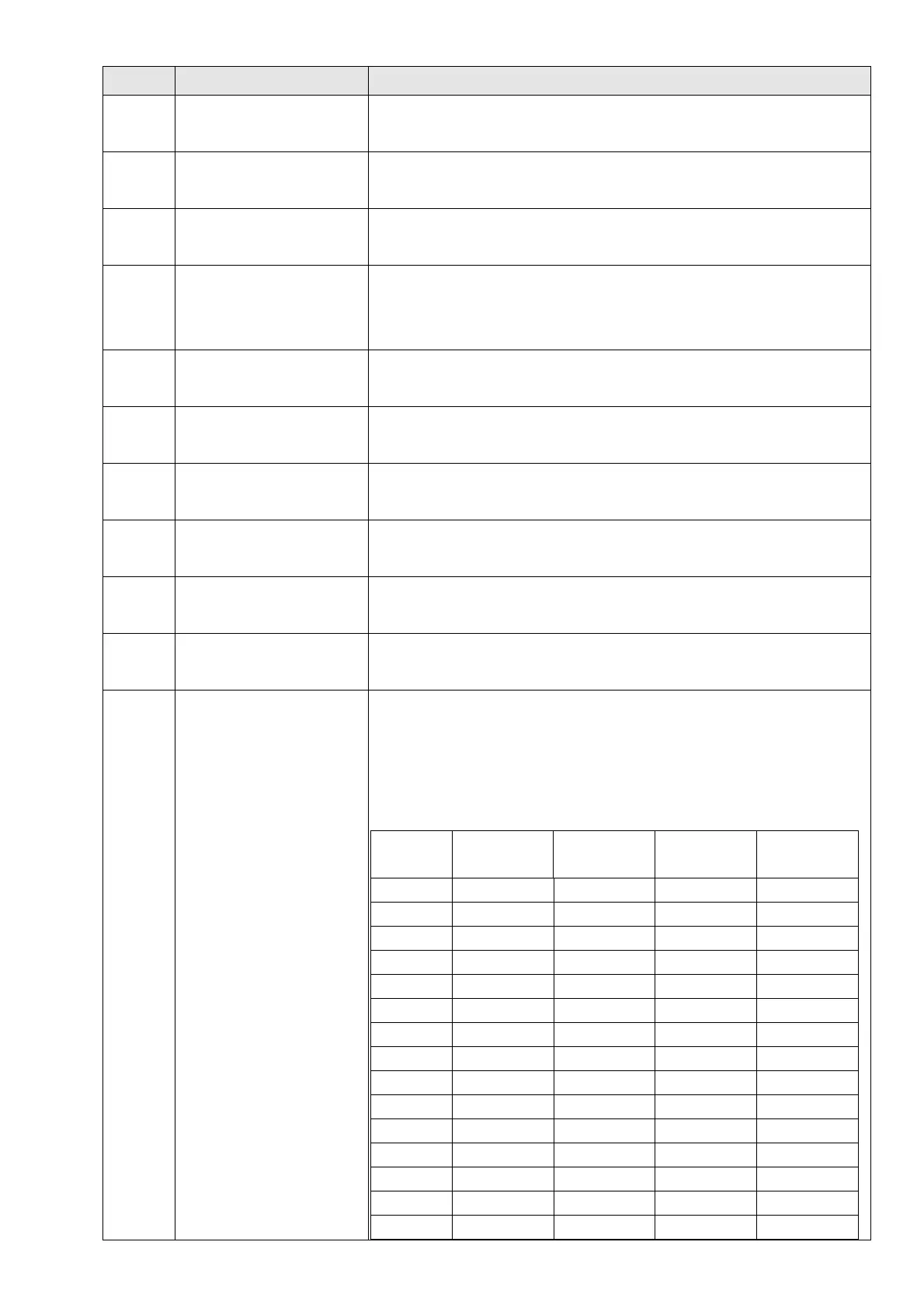
41 Multi-position reached
You can set any three multi-function input terminals to 41 (as table
below). These three terminals output according to the completed
position of multi-point positioning.
For example: set Pr. 02-36–02-38 to 41, the second point of the
multi-point positioning is completed. In this case, RY2 is ON, RY1
and MO1 are OFF (010). bit0 is RA and so on.
MO2
Pr.02-17=41
MO1
Pr.02-16=41
RY2
Pr.02-14=41
RY1
Pr.02-13=41
Pr. 04-16 0 0 0 1
Pr. 04-18 0 0 1 0
Pr. 04-20 0 0 1 1
Pr. 04-22 0 1 0 0
Pr. 04-24 0 1 0 1
Pr. 04-26 0 1 1 0
Pr. 04-28 0 1 1 1
Pr. 04-30 1 0 0 0
Pr. 04-32 1 0 0 1
Pr. 04-34 1 0 1 0
Pr. 04-36 1 0 1 1
Pr. 04-38 1 1 0 0
Pr. 04-40 1 1 0 1
Pr. 04-42 1 1 1 0
Pr. 04-44 1 1 1 1
 Loading...
Loading...