71
ES
6
Prueba automática de funcionamiento
Para asegurarse de que el Dock y la aeronave funcionan correctamente, cree una ruta de vuelo y planifique
una tarea de vuelo con DJIFlightHub2. A continuación, ejecútela de modo que el Dock realice una prueba
automática de funcionamiento tras finalizar la configuración de este con la aplicación.
Vinculación del Dock con un proyecto
1. Visite https://fh.dji.com con un ordenador e inicie sesión en DJIFlightHub2 con una cuenta DJI.
2. Haga clic en Proyecto (Project)>+ en la lista de proyectos y, a continuación, indique la información
pertinente para crear un proyecto.
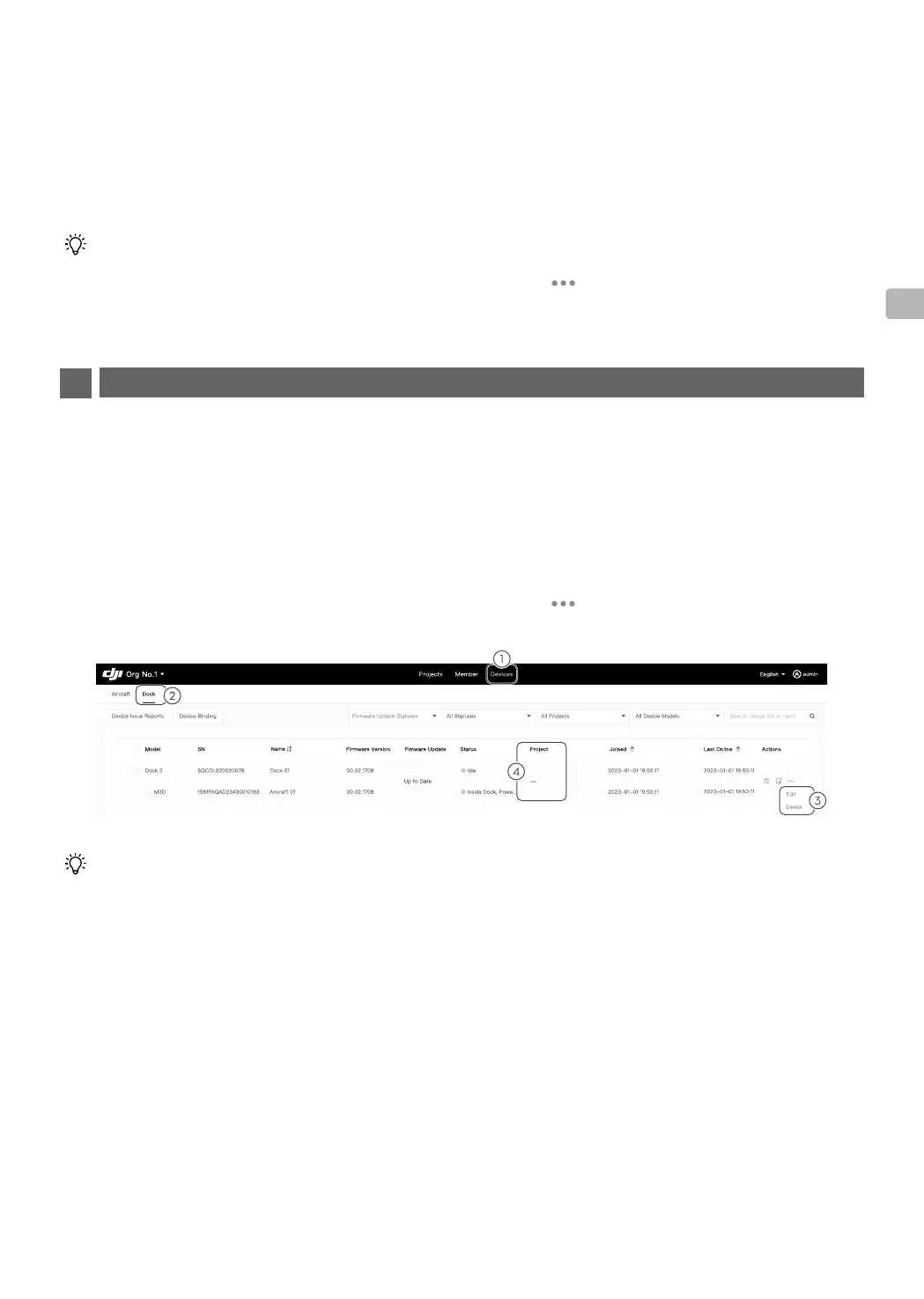
3. Haga clic en Dispositivos (Devices)>Dock>Acciones (Actions) >Editar (Edit), como se muestra en el
diagrama, y añada el Dock al proyecto concreto en el cuadro desplegable.
• Haga clic en Miembros (Members) para añadir miembros e indique los datos de cuentas (cuenta DJI),
organización y roles, correspondientes a los miembros.
Vinculación del control remoto como controlB
Para garantizar la seguridad de la prueba de vuelo del Dock, puede usar el control remoto para controlar la
aeronave manualmente durante el vuelo tras vincularse a la aeronave como controlB.
1. Desconecte el cable USB-C y reinicie la aplicación DJIPilot2. A continuación, pulse ControlA (Controller A) en
la página de inicio y cambie a ControlB (Controller B).
2. Encienda la aeronave, mantenga presionado el botón de encendido durante un mínimo de cincosegundos y
espere a que el control remoto se vincule correctamente a ella.
• Asegúrese de calibrar la brújula de la aeronave antes de usarla por primera vez. De lo contrario, la
precisión del posicionamiento de la aeronave podría verse afectada negativamente.
• Vaya a vista de cámara en la aplicación DJIPilot2 y pulse para establecer los parámetros de la
cámara, el controlador de vuelo, el sistema de detección, el control remoto y la batería.